-
论文名称:Deep High-Resolution Representation Learning for Visual Recognition
-
论文作者:Jingdong Wang, Ke Sun, Tianheng Cheng, Borui Jiang, Chaorui Deng, Yang Zhao, Dong Liu, Yadong Mu, Mingkui Tan, Xinggang Wang, Wenyu Liu, and Bin Xiao (Microsoft Research Asia)
-
收录情况:TPAMI 2020
简介
这篇论文其实是总结了HRNet在人体关键点估计、物体识别、语义分割视觉任务的表现,它的工作基础:
- Deep High-Resolution Representation Learning for Human Pose Estimation
- CVPR 2019
- HRNet-FCOS
- HRNet-Object-Detection
- HRNet-MaskRCNN-Benchmark
- HRNet-Semantic-Segmentation

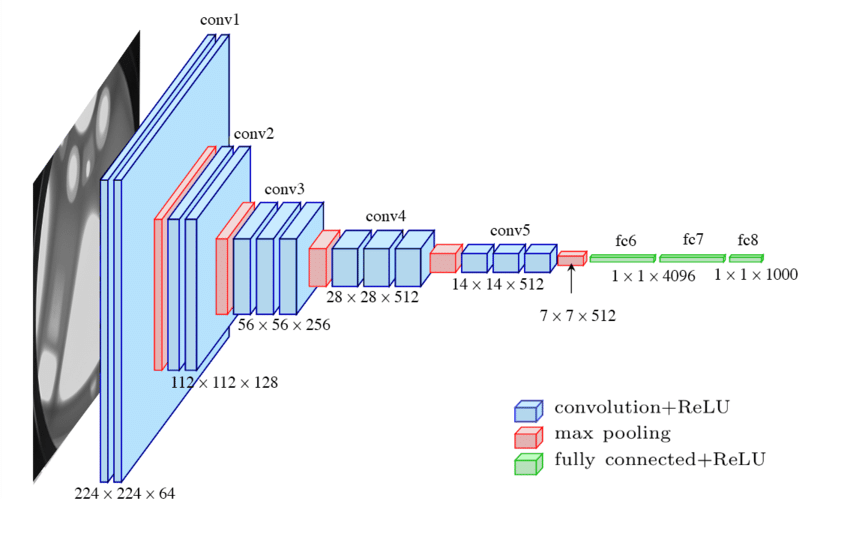
- VGG
- U-Net
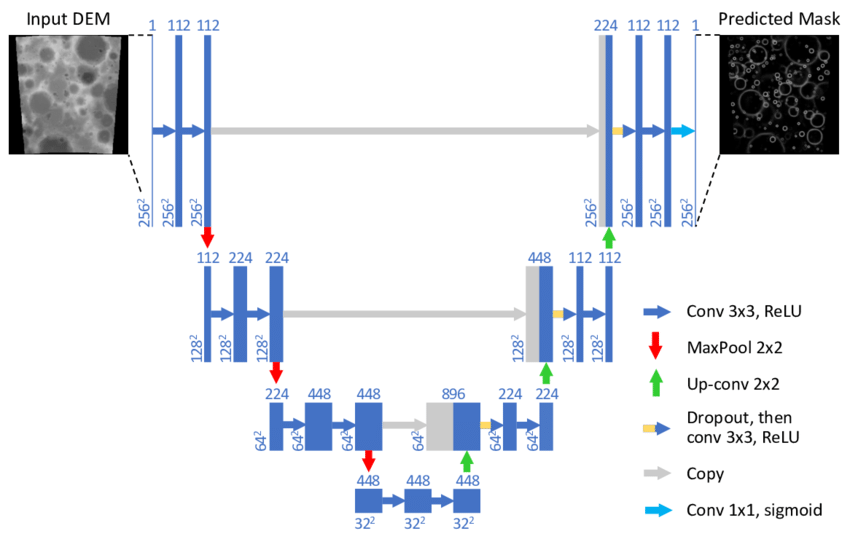
计算机视觉任务中,人们设计的骨干网络常常遵循“高分辨率”降采样到“低分辨率”,再由“低分辨率”升采样到“高分辨率”的模式,很少有人探索过更新颖的网络结构。但显而易见的是,高的图像分辨率有助于提升检测、分割、关键点提取的准确性,本文提出的网络结构不同于上述模式,具体表现为
- 并行地连接高分辨率、低分辨率卷积流
- 不同分辨率卷积流之间频繁地交换信息
实验表明HRNet对提升物体检测、分割、姿态估计准确性方面具有显著优势,更广阔的意义是能作为一个通用的$\color{red}{骨干网}$,应用在各项视觉任务上。
High-Resolution Networks
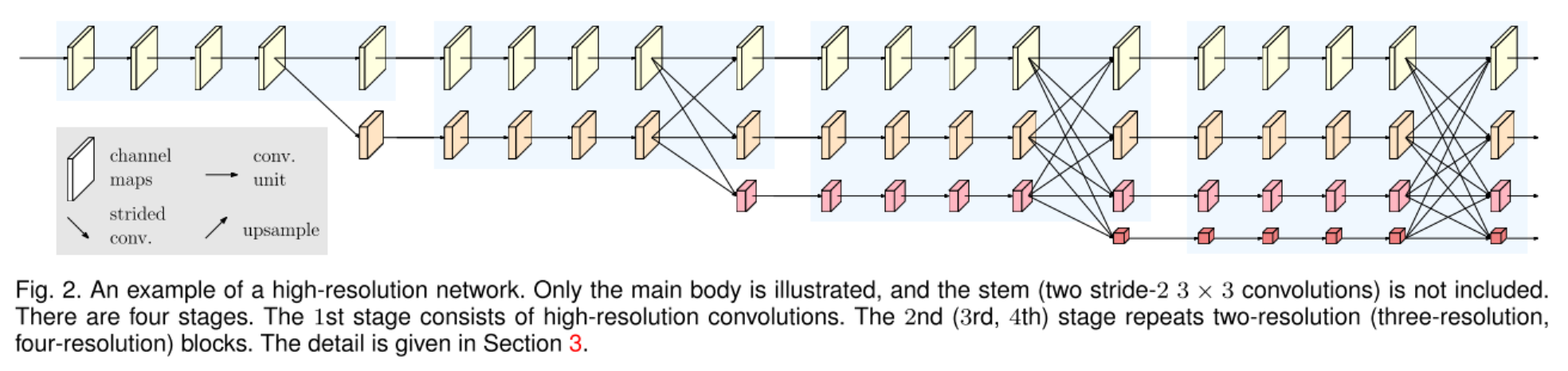 图片输入进来,首先经过2个 stride=2 的3x3卷积(上图只显示了主体部分,不包括2个 stride=2 的3x3卷积),分辨率降维1/4,最终输出的也是 1/4 分辨率,主体部分由几个模块构成:
图片输入进来,首先经过2个 stride=2 的3x3卷积(上图只显示了主体部分,不包括2个 stride=2 的3x3卷积),分辨率降维1/4,最终输出的也是 1/4 分辨率,主体部分由几个模块构成:
- parallel multi-resolution convolutions
- repeated multi-resolution fusions
- representation head
根据不同任务设计的变种
- HRNetV1 for pose estimation
- HRNetV2 for semantic segmentation
- HRNetV2p for object detection
- 作为骨干网,应用到目标检测器,提升小目标检测能力
- parallel multi-resolution convolutions
- 不采用传统 high-low-high 的模式,另辟蹊径
-
从一个高分辨率卷积流开始,并行地增加低分辨率卷积流,下图概括了并行多分辨率卷积流的结构
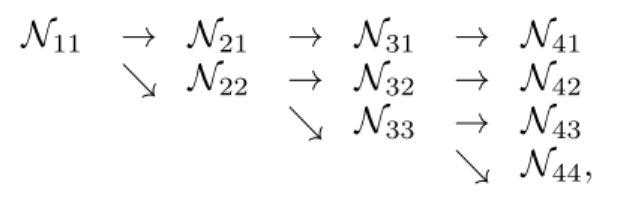
- $\mathbb{N}_{sr}$ 代表第 $s$ 个阶段、第 $r$ 个分辨率一个子模块,
- \[resolution = \frac{1}{2^{r-1}}\]
- repeated multi-resolution fusions
- 想法是让不同分辨率的特征图交换信息
-
下图示例,让3个不同分辨率的特征图交换信息
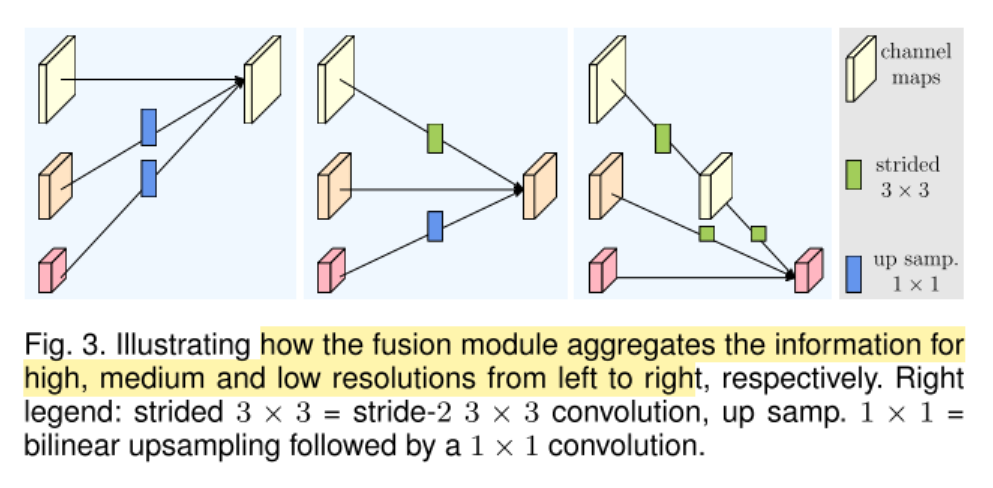
- 输入有三种分辨率:${ \textbf{R}_r^i, r=1,2,3 }$,对应的输出分辨率:${ \textbf{R}_r^o, r=1,2,3 }$
- \[\textbf{R}_r^o = f_{1r}(\textbf{R}_1^i) + f_{2r}(\textbf{R}_2^i) + f_{3r}(\textbf{R}_3^i)\]
- 跨分辨率的融合有一个额外的输出,参见整体架构图中第3阶段第4级分辨率的输入
- \[\textbf{R}_4^o = f_{14}(\textbf{R}_1^i) + f_{24}(\textbf{R}_2^i) + f_{34}(\textbf{R}_3^i)\]
- 这里的变换函数 $f_{xr}(\cdot)$ 依赖于输入分辨率索引$x$和输出分辨率索引$r$
- $x = r$时,$f_{xr}(\textbf{R}) = \textbf{R}$
- $x \lt r$时,$f_{xr}(\textbf{R})$ 对输入$\textbf{R}$进行下采样,使用$r-s$个步长为2的3x3卷积,
- $x \gt r$时,$f_{xr}(\textbf{R})$ 对输入$\textbf{R}$进行上采样,使用1x1的卷积对通道数进行对齐
- representation head
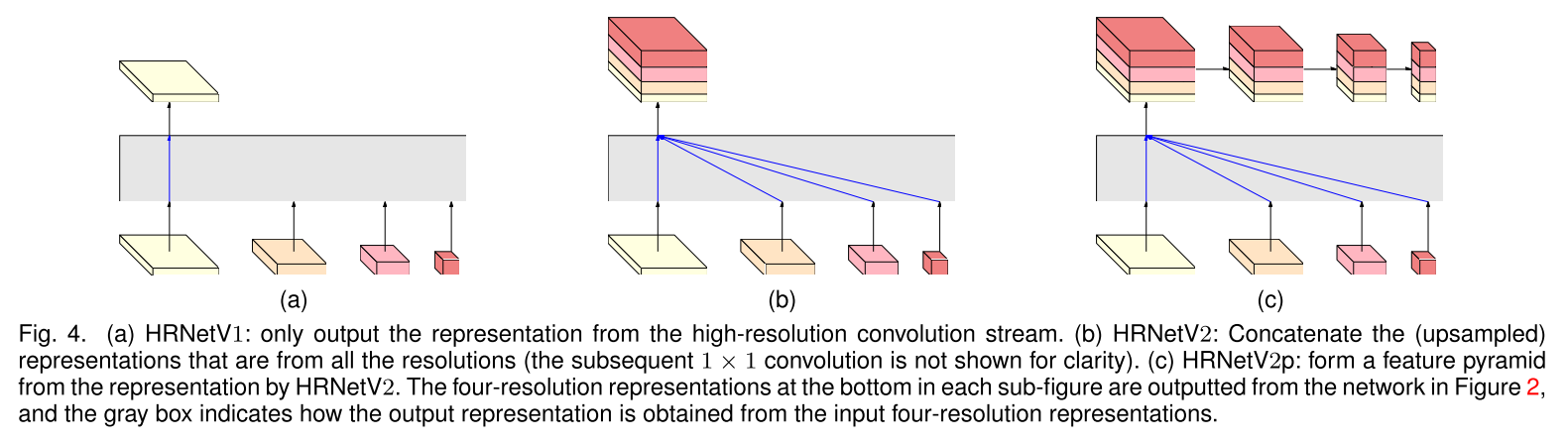
- 网络结构的头部表示,本文提出了3种类型,见下图
- HRNetV1,应用到人体姿态估计;输出表示仅来自高分辨率卷积流
- HRNetV2,应用到语义分割;用双线性插值上采样低分辨率卷积流,再把四种分辨率的表示连接起来,
- HRNetV2p,应用到目标检测;通过下采样高分辨率的表示,得到多种低分辨的表示,利用不同分辨率的表示构建多级表示
- 网络结构的头部表示,本文提出了3种类型,见下图
- instantiation
- 网络主体由4个并行的卷积流组成,1/4, 1/8, 1/16, 1/32 四种分辨率
- 第一个卷积流包含4个残差单元,每个残差单元
- 宽度64的bottleneck
- 接一个 3x3 的卷积,把特征图的宽度改到$C$
- 第二个、三个、四个并行卷积流分别包含 1,4,3 个模块化的block
- 这个模块化的block包含4个残差单元,每个残差单元包含2个3x3的卷积,每次卷积后经过 batch normalization 和Non-Linear ReLU处理
- 四种分辨率对应的卷积的通道数分别是 $C, 2C, 4C, 8C$,如第一幅图所示
- analysis
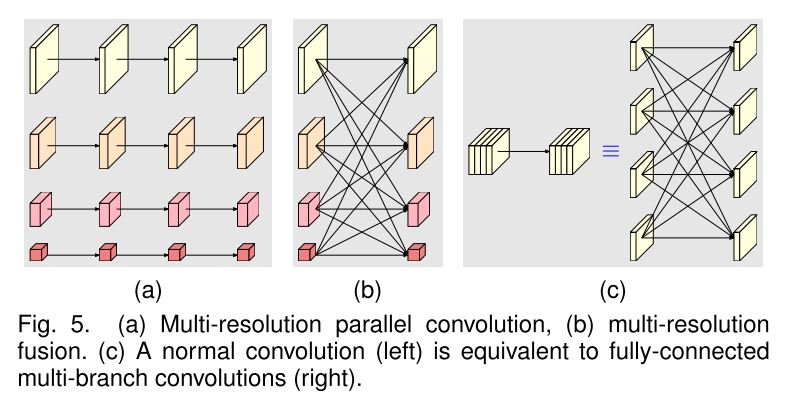
- 子图c是作者的观点
- 每个输出通道的子集是之前各个卷积流输出的加和
- 首先分析一下模块化的block,它有2个关键组件
- multi-resolution parallel convolutions,对应子图a
- multi-resolution fusion,对应子图b
- 多分辨率融合单元集成了多个卷积流的输出
COCO Object Detection
- 数据集:MS COCO 2017 detection dataset
- 118k images for training
- 5k for validation and 20k for test
- 水平翻转,图片短边缩放到800 pixels
- 评价指标:$average precision$ (AP) $\rightarrow$ AP[0.5,0.05,0.95]
- 参考指标:$AP_S$、$AP_M$、$AP_L$、$AP_{50}$、$AP_{75}$
- COCO Object Detection
- 比较运算速度和参数量:GFLOPs and #parameters
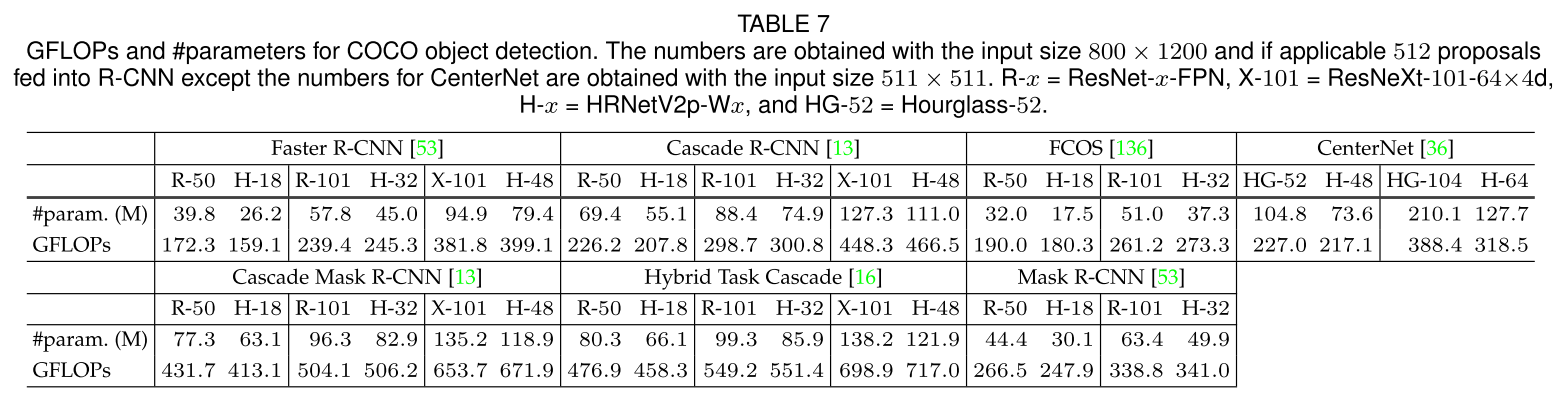
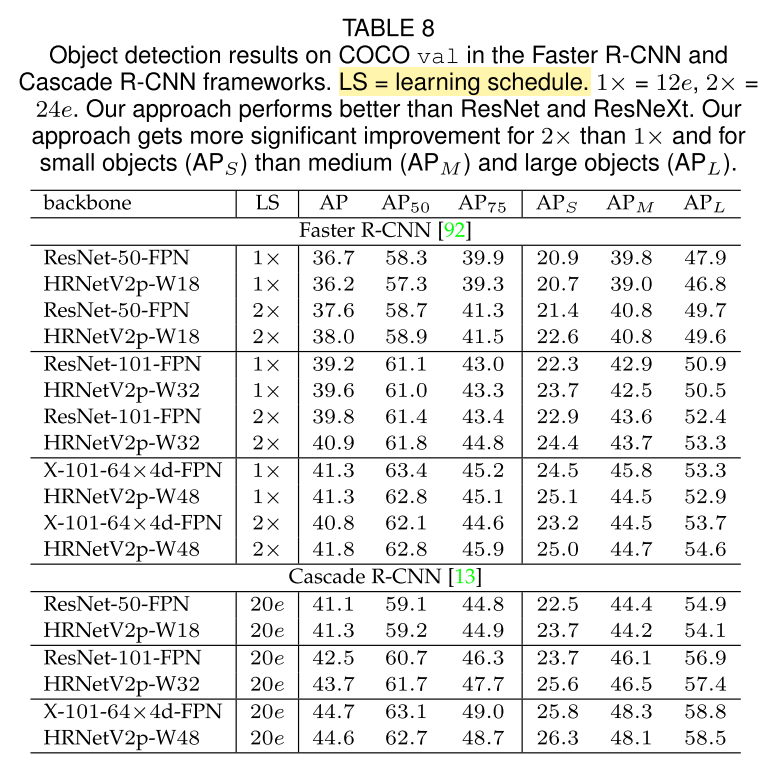
- Object Detection results on COCO val
- 使用不同的骨干网,HRNet是其中一种
- 两阶段检测器:Faster R-CNN、Cascade R-CNN
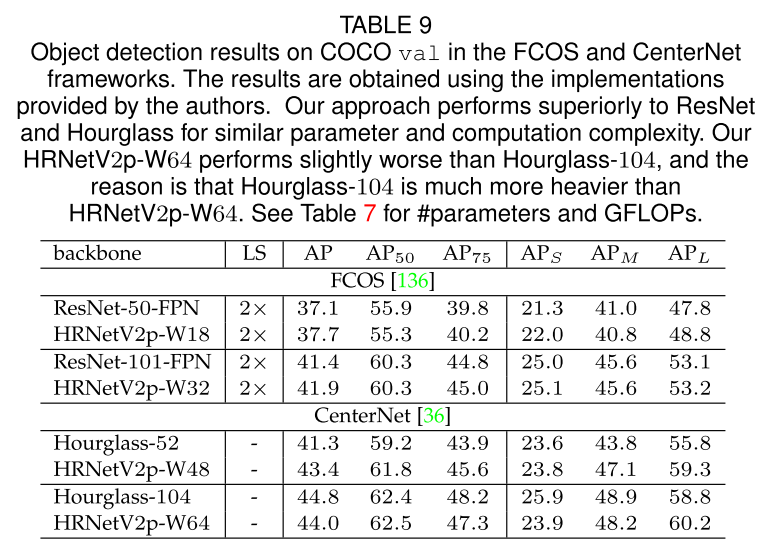
- Object Detection results on COCO val
- 使用不同的骨干网,HRNet是其中一种
- 一阶段检测器:FCOS、CenterNet
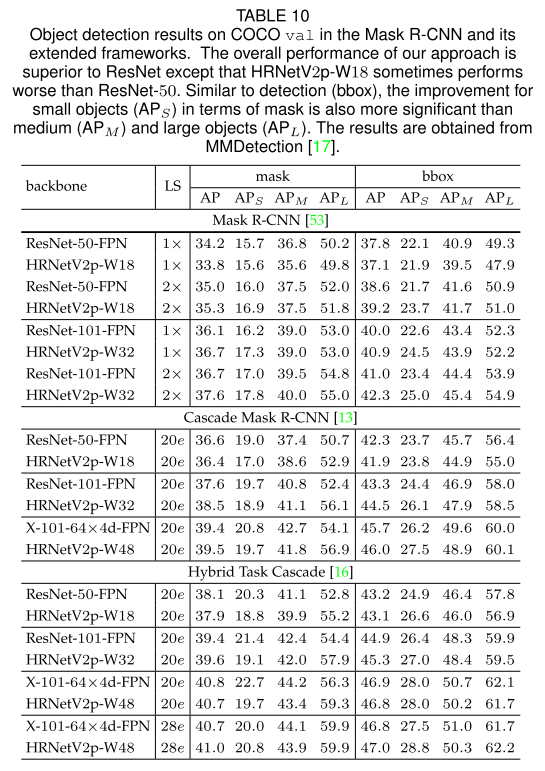
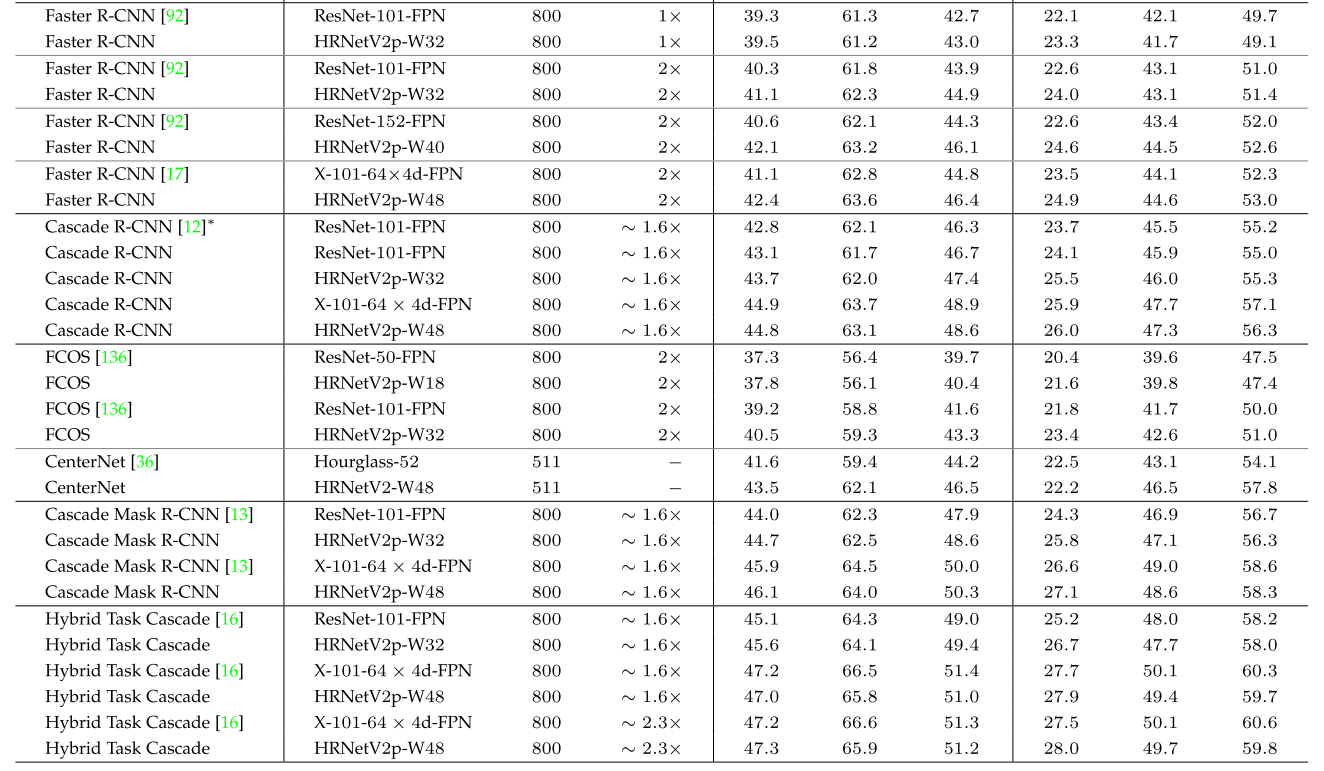
- Object Detection results on COCO val
- 使用不同的骨干网,HRNet是其中一种
- 兼具检测和分割的方法:Mask R-CNN、Cascade Mask R-CNN、Hybrid Task R-CNN
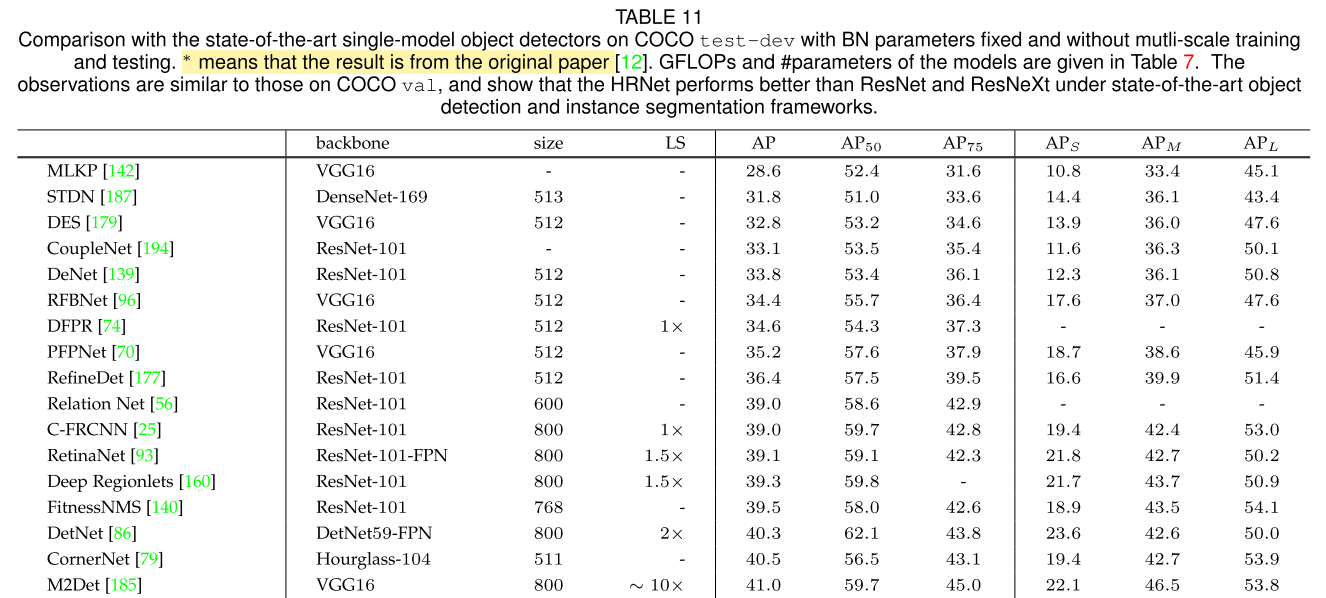
- Object Detection results on COCO test-dev(表中LS:learning schedule)
- 使用不同的骨干网,HRNet是其中一种
- 目标检测器:BN parameters fixed & without mutli-scale training and testing
一些思考
- 批判性思考
- 扬长避短,重点谈准确率,谈效率时只和参数量大的比
- 不管论文中不中,选定方向,坚持做,坚持写