介绍几个问题,相机校准(标定)、姿态估计、对极几何、从双目图像计算深度,这部分和之前学过的《视觉SLAM十四讲》几章内容重叠
相机校准
- 畸变类型:径向、切向畸变
- 有各自的畸变参数
- 标定相机内参、外参
- 通常用棋盘,因为比较整齐,容易设定参照坐标
- 对于棋盘中的交点,既知道世界坐标,又知道像素坐标,就能列方程求解
- 为了达到好的效果,需要多找几组点 $\geq$ 10
- 通常用棋盘,因为比较整齐,容易设定参照坐标
- 去畸变
姿态估计
-
得到相机内参、畸变系数
-
cv.solvePnP()就能求解图像中特定物体的姿态- 从3D-2D点对求解旋转、平移矩阵
对极几何
- 从2D-2D点对求解旋转、平移矩阵
- 飞鸟检测的定位应该关注这里
- 多视几何
- 从不同视角,观察物体、场景,这不就是多机场摄像头拍摄同一块区域
- 对极点、对极线、对极约束、对极平面
双目相机深度图
- 双目相机,拍摄了对同一场景的两幅图,利用相机参数就能求其中物体深度
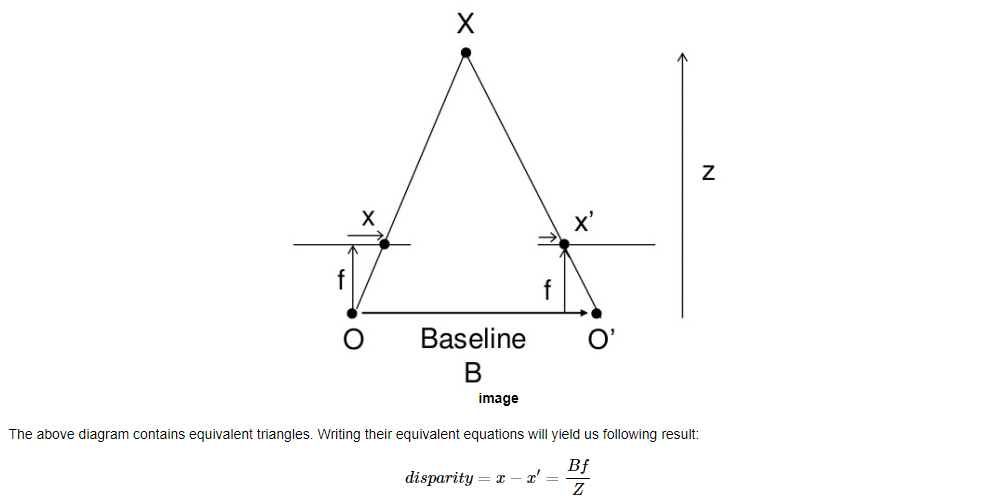
根据计算公式,视差的单位是m/cm等,不是pixel