-
论文名称:Learning 3D Semantic Scene Graphs from 3D Indoor Reconstructions
-
论文作者:Johanna Wald, Helisa Dhamo, Nassir Navab, Federico Tombari(TUM、Google)
-
收录情况:CVPR 2020
简介
3D场景理解就是感知和理解用3D数据表示的场景,不仅要求能识别和定位出3D空间的物体,而且能理解物体间的关系和所处的环境。这种彻底的3D场景理解对很多任务具有吸引力,比如自动导航,AR、VR。
当前的3D场景理解包含了实例分割、语义分割、3D物体检测等任务。这些工作把重点放在物体语义上,物体之间的关系和物体所处的环境主要用来提升物体分类的准确性。
最近,根据图像的场景理解开始探讨场景图的用途,比如用它来辅助理解物体之间的关系。在此之前,场景图已经被用在计算机图形学,排列图形场景的空间表示,其中节点表示物体实例,边表示连个节点的相对变换。这些概念被成功扩展到计算机视觉数据集,有 support structures/ semantic relationships and attributes / hierarchy mapping of scene entities。 场景图在图片搜索、图像生成方面展现出用处。
本文想要集中研究3D场景图的语义和潜在用处,目标是获得带标签的实例节点、带语义的关系边的场景图(如下所示),这种场景图具有以下功能:
- 对于场景和噪声的变化比较鲁棒
- 填补文本、图像数据类型差异带来的鸿沟,在2D-3D场景检索、VQA方面很有应用前景
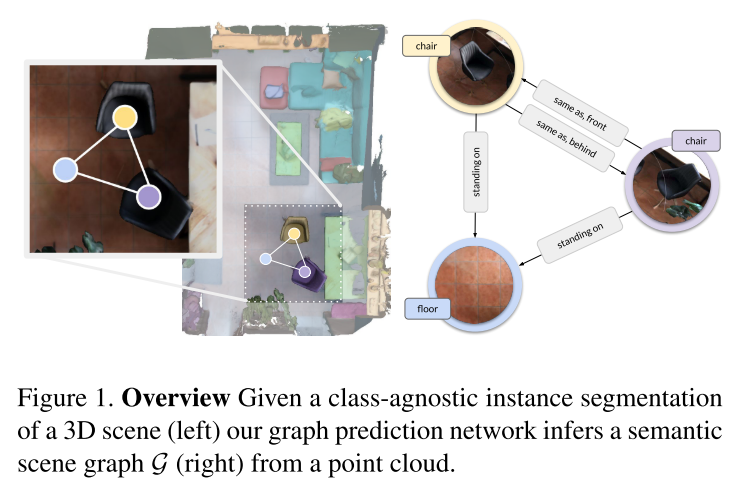
本文认为生成场景图是3D场景理解的基础,提出一种深度学习方法预测3D semantic graph,该方法基于PointNet和GCN实现,并展示了场景图在 3D场景-2D图片 中的能力。总结起来有以下几个贡献:
- 制作了3D场景数据集——3DSSG,该数据集扩展了3RScan,在上面加了场景语义标注、节点关系和属性、节点类别等信息
- 提出一种从3D point cloud生成语义场景图的方法
- 展示了3D 语义场景图在跨领域检索的能力——从2D图片检索3D场景
3D Semantic Scene Graphs
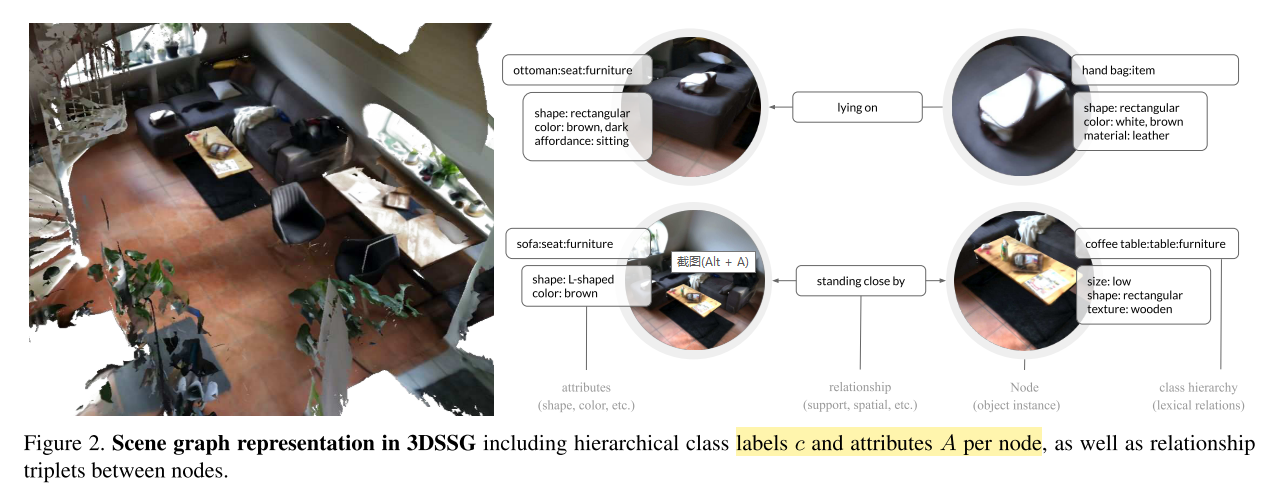
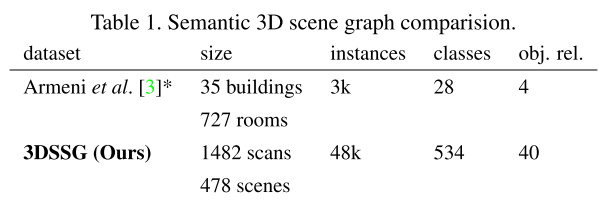
本文同时发布了3D语义场景图的数据集——3DSSG,包含478个室内环境,1482个3D重建场景,48K 物体。3DSSG中的语义图用 $(\mathcal{N}, \mathcal{R})$ 这样的元组集合表示,$\mathcal{N}$ 表示节点——3D物体实例,$\mathcal{R}$ 表示边。
比较特别的地方是,每个节点不只属于单个类别,而是属于分层次的类别 $c = (c_1, \dots, c_d)$;每个节点还有一个属性集合$A$,描述了物体实例的外观和物理性质;其中一个属性子集叫作 $affordances$,它描述了物体间的交互性质,比如 $bottles~stand~ on~ the~ chairs$
- Nodes
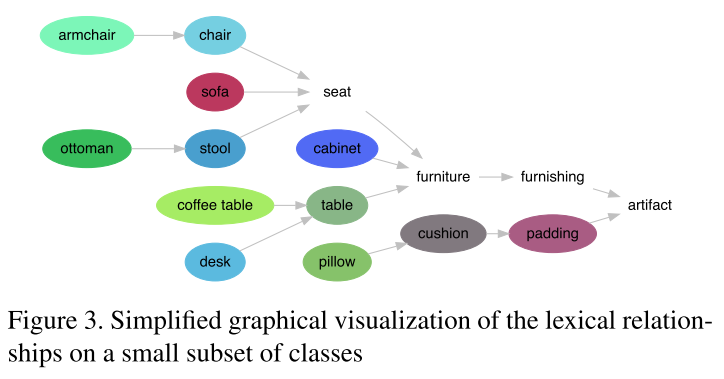
- 图中的节点就是3D物体实例,每个实例属于一个3D场景,类别标签记为 $c_1$,后续的类标签是通过使用WordNet递归解析 $c_1$ 的超名词的词法定义获得的
- 例如,通过定义”chair with a support on each side for arms”知:$c_{n+1} = chair$ 是 $c_n = armchair$ 的超名词
- 1482个3D重建场,包含534个不同类别,对应534个文法描述
- 图中的节点就是3D物体实例,每个实例属于一个3D场景,类别标签记为 $c_1$,后续的类标签是通过使用WordNet递归解析 $c_1$ 的超名词的词法定义获得的
- Attributes
- Static Properties.
- 视觉特征:物体颜色、大小、形状、纹理
- 物理性状:是否刚性
- 从文法描述抽取属性:a ball is spherical
- Dynamic Properties
- 随时间变化
- 描述物体状态:定义了和物体类别相关的状态类别(这个是很自然的)
- open/closed, empty/full, on/off
- Affordances
- 描述特定物体的功能或与环境的交互
- $seat$ is for $sitting$
- only a $closed~door$ can be $opened$
- 描述特定物体的功能或与环境的交互
- Static Properties.
- Relationships
- Support Relationships. 描述一个场景的支撑结构
- walls are by default supported by the floor
-
floor does not have any support
- 自动抽取support relationships是非常具有挑战性的,对于场景中的每个物体,仅考虑小半径范围内的相邻物体,之后抽取过程分为两步
- 消除错误的supports
- 补全丢失的candidates
- Proximity Relationships. 这里指的是相对于参考场景的空间位置邻近关系,我感觉和support relationships有重复的说辞
- next to/ in front of
- 只计算有共同 support parent 的两个物体实例的 Proximity Relationships
- 作者也说了,Proximity Relationships能从support parent导出
- Comparative Relationships.
- bigger than/ same shape as/ darker than/ cleaner than
- Support Relationships. 描述一个场景的支撑结构
Graph Prediction
-
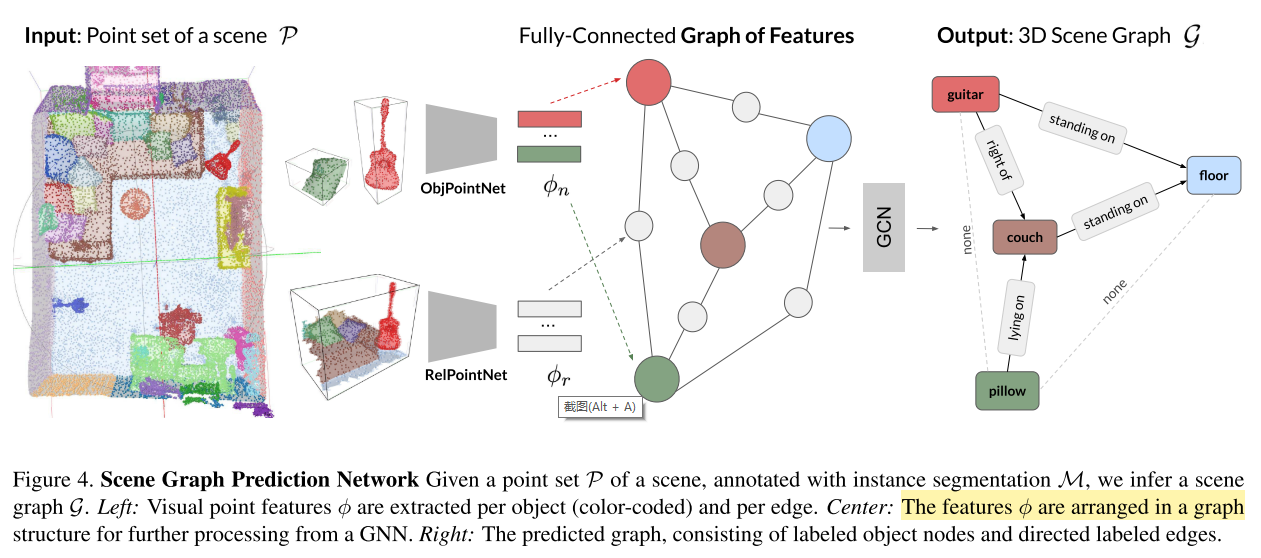
给定场景$s$的点集 $\mathcal{P}$ 和类别无关的实例分割 $\mathcal{M}$(我理解就是带标签的点集),Scene Graph Prediction Network(SGPN)的目标是生成一幅图 $\mathcal{G} = (\mathcal{N}, \mathcal{R})$。
-
SGPN 包含
- 为每个节点$\phi_n$和每条边$\phi_r$抽取视觉特征,用了两个PointNet,第一个称为ObjPointNet,第二个称为RelPointNet
- 对于场景$s$,用实例分割图$\mathcal{M}$作mask,抽取每个物体实例$i$的点集
- \[\mathcal{P}_i = \{\delta_{m_k i} \odot p_k\}_{k=1, |\mathcal{P}|}\]
- $\delta$ 表示 Kronecker delta($\delta_{ij} = 1 \Leftrightarrow i = j$)
- $p, m$ 是$\mathcal{P}$,$\mathcal{M}$的实例
- $m_k$ 是$\mathcal{M}$上点的标号,并不是真实的点
- $|\mathcal{P}|$ 是$\mathcal{P}$包含的点数
- 这个公式,前面的 $\delta_{m_k i}$ 和 运算$\odot$是用来作mask的,看取不取$p_k$。
- 整体含义:遍历$\mathcal{P}$中的点$k$,如果$m_k$属于实例$i$,就取点 $p_k$
- 相当于通过实例分割图$\mathcal{M}$ + $\mathcal{M}$和$\mathcal{P}$的对应关系,取$\mathcal{P}$中的点
-
每个$\mathcal{P}_i$ 会输入到 ObjPointNet
- 同时为每对物体实例 $i,j$ 抽取一个点集 $\mathcal{P}_{ij}$
- \[\mathcal{P}_{ij} = \{p_k | p_k \in (\mathcal{B}^i \cup \mathcal{B}^j)\}_{k=1, |\mathcal{P}|}\]
- $\mathcal{B}$ 表示对应物体实例的3D bbox
- $\mathcal{P}_{ij}$ 输入到 RelPointNet,与$\mathcal{M}_{ij}$拼接(当$\mathcal{P}_{ij}$和物体$i$对应时,$\mathcal{M}_{ij}$为1,当$\mathcal{P}_{ij}$和物体$j$对应时,$\mathcal{M}_{ij}$为0)。从上面的描述看出,$ \mathcal{P}_{ij} $ 包含了方向信息,这种方向信息($left/right$)对于推断 proximity relationships 很重要。
-
在物体中心点集和边点集输入OjbPointNet、RelPointNet前,进行归一化操作
- 以三元组的形式,在图结构中排列抽取的特征
- (subject, predicate, object)
- $\phi_n$ 占据subject/object位置,$\phi_r$ 占据predicate位置
- 使用一个GCN处理上面的3元组,分为两个步骤
- 信息传播
- \[(\psi_{s, ij}^{(l)}, \phi_{p, ij}^{(l+1)}, \psi_{o, ij}^{(l)}) = g_1(\phi_{s, ij}^{(l)}, \phi_{p, ij}^{(l)}, \phi_{o, ij}^{(l)})\]
- $g_1$ 是MLP
- $\psi$ 表示处理后的特征,$s$ 表示subject,$o$ 表示object,$p$ 表示predicate
- 信息聚合
- \[\rho_i^{(l)} = \frac{1}{|\mathcal{R}_{i,s}| + |\mathcal{R}_{i,o}|} (\sum_{j \in \mathcal{R}_s} \psi_{s, ij}^{(l)} + \sum_{j \in \mathcal{R}_o} \psi_{o, ji}^{(l)})\]
- $\mathcal{R}_{s}$ 是对应节点作为主体的连接集合、$\mathcal{R}_{o}$ 作为客体的连接集合
- 聚合后的物体节点特征输入另一个MLP,并且采用残差连接克服潜在的Laplacian smoothing(???这是在说啥),得到最终的节点特征
- \[\phi_i^{(l+1)} = \phi_i^{(l)} + g_2(\rho_i^{(l)})\]
- $\phi_i^{(l+1)}$ 再被传到下一层处理
- GCN 的最后2层是MLP,预测node、predicate类别(其实都归结到了分类问题)
- 信息传播
- Losses
- object classification loss $\mathcal{L}_{obj}$ as well as a predicate classification loss $\mathcal{L}_{pred}$
- \[\mathcal{L}_{total} = \lambda_{obj}\mathcal{L}_{obj} + \mathcal{L}_{pred}\]
- 真实情况中,一对物体可能有多种关系,比如一个椅子在另一个之前(in front of),并且与相同的外观(same as),所以把 $\mathcal{L}_{pred}$ 定义成多个二分类交叉熵损失的组合,即对于每个类别,判断是不是这类关系
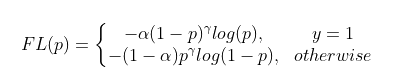
- 为了处理类别不平衡问题,每个损失项用到了 focal loss
- 我理解的是focal loss是对交叉熵损失的变形,处理类别不平衡问题
-
\[\mathcal{L} = -\alpha_t (1-p_t)^{\gamma} \log p_t\]
- $p_t$ 是预测的概率,$\gamma$ 是超参数
- 对于$\mathcal{L}_{obj}$,$\alpha_t$是归一化的逆频率;对于$\mathcal{L}_{pred}$,$\alpha_t$是固定的 edge/no-edge 因子
- 说明,这里只考虑了正样本(???为什么):
- 当输入是容易正确分类的正样本,$\alpha_t (1-p_t)^{\gamma}$ 降低了它对损失函数的贡献
- 当输入是较难正确分类的正样本,$\alpha_t (1-p_t)^{\gamma}$ 增加了它对损失函数的贡献
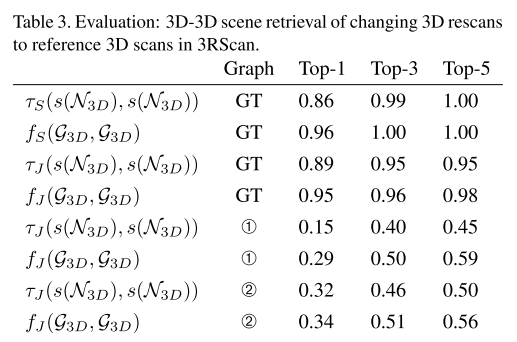
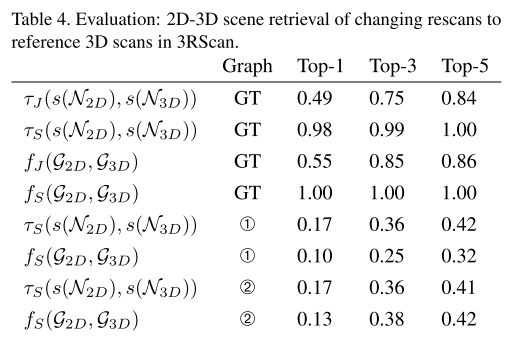
Scene Retrieval
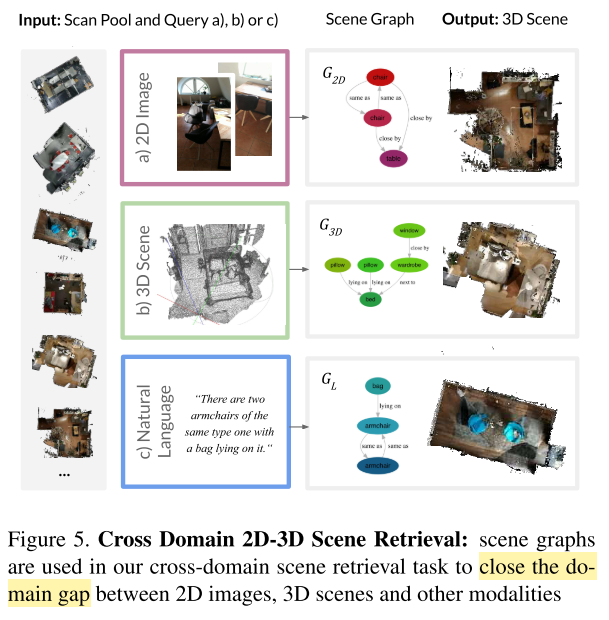
本文引入一项任务:给定一张2D图片(可以看作query),从一系列扫描图识别出对应的3D场景。这项任务的挑战性体现在:
- multiple domains(2D and 3D)
- scene changes(moving objects, changing illumination)
- 不去用图编辑距离直接计算它们的相似度,而是先把场景图变换成 multisets,每个set包含节点类别和对应的边(后半句是我的理解)。
- 定义一个相似度分数 $\tau$,对应multisets $s(\mathcal{G})$(???一个图$\mathcal{G}$,怎么来的相似度分数)
- 采用两种相似度计算方法
- Jaccard similarity
- \[\tau_{J}(A,B) = \frac{|A \cap B|} {|A \cup B|}\]
- Szymkiewicz-Simpson coefficient
- \[\tau_{S}(A,B) = \frac{|A \cap B|} {min(|A|, |B|)}\]
- A、B是不同的set
- 当A、B大小差异较明显时,更能筛选出有意义的匹配(???是说min(|A|, |B|)小于|A $\cup$ B|},然后算出来的分数更大吗)
- Jaccard similarity
- 匹配 $\mathcal{G}$ 和 $\mathcal{G}{}^{'}$时,组合 similarity metric of
- the object semantics
- generic node edges $\mathcal{E}$
-
semantic relationships $\mathcal{R}$
- 得到
- \[f(\hat{\mathcal{G}}, \hat{\mathcal{G}}{}^{\:'}) = \frac{1}{ |\hat{\mathcal{G}}| } \sum_{i=1}^{|\hat{\mathcal{G}}|} \tau(s(\hat{\mathcal{G}}^{(i)}), s(\hat{\mathcal{G}}{}^{\:'(i)}))\]
- $\hat{\mathcal{G}} = (\mathcal{G}, \mathcal{E}, \mathcal{R})$ 称为增强的图
- 我理解这里 $f(\cdot)$ 是算最终的相似度得分的吧,$s(\cdot)$ 是一个multiset
实验
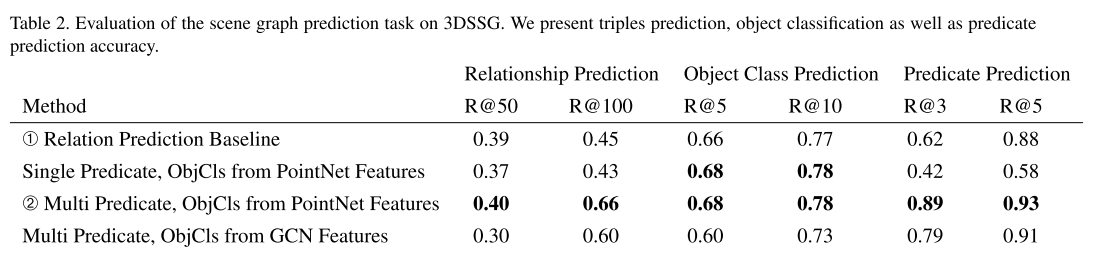
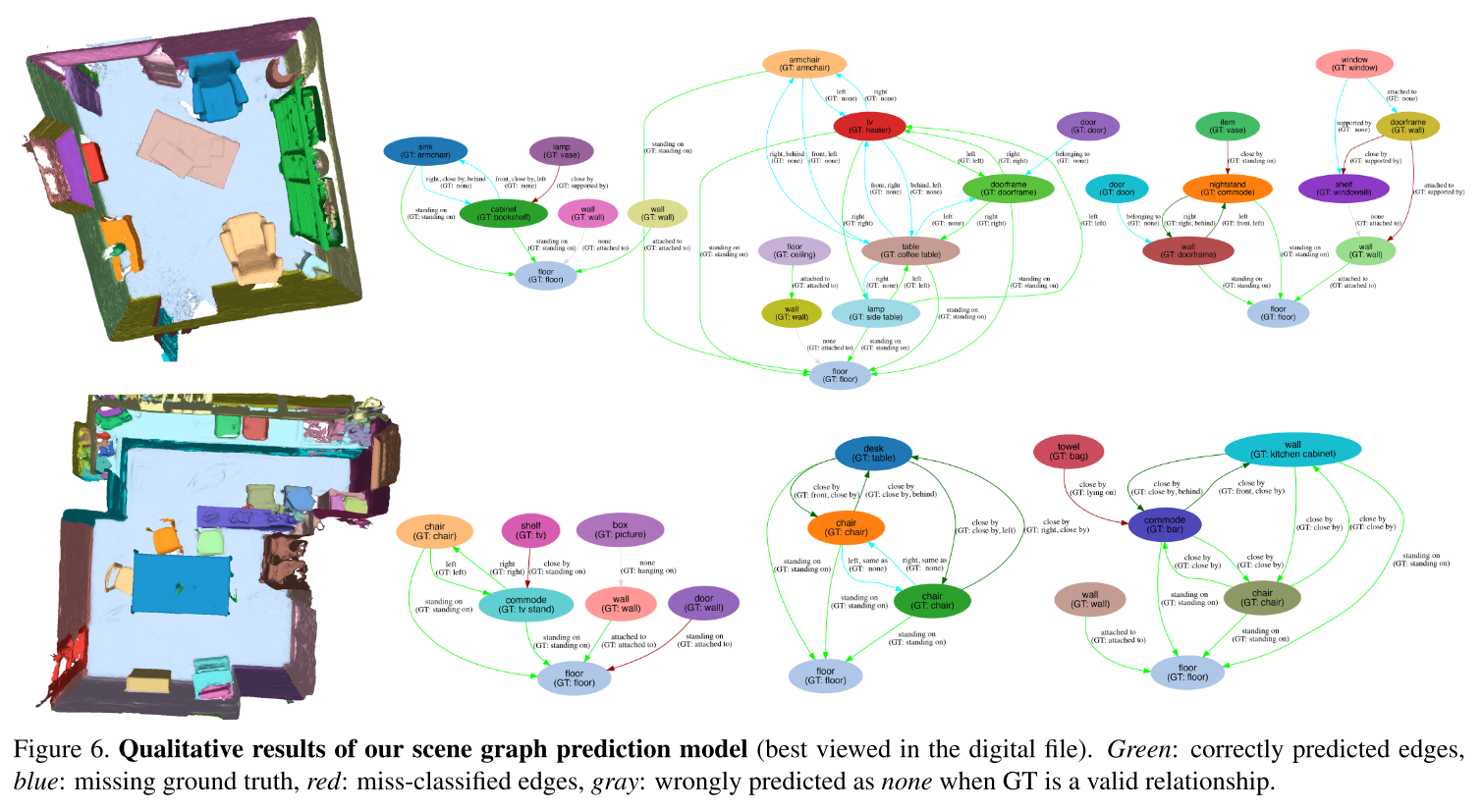
- Semantic Scene Graph Prediction
- 评价指标是 Recall@top-n
- Scene Retrieval