-
论文名称:Recovering 3D Planes from a Single Image via Convolutional Neural Networks
-
论文作者:Fengting Yang and Zihan Zhou(Pennsylvania State University)
-
收录情况:ECCV 2018
简介
-
从单张图片进行3D重建是个有挑战性的任务,之前的工作提出了基于结构规则的方法,这些结构有 planar surfaces, repetitive patterns, symmetrics, rectangles, cuboids 等等。提取到这些结构的3D模型往往很有用,因为它们提供了高层的、压缩的场景几何性质表示,对于大规模地图压缩、语义场景理解、人机交互等很有用。
- 本文研究的问题是恢复3D平面——man-made 环境最常见的结构。前人对这个问题展开了一些研究,提出各种方法拟合场景的 piecewise planar。这些方法属于 2.$bottom-up~approach$
- 检测图片中的直线段、角、结合点灯几何特征
- 通过对检测到的空间几何性质分组,找到planar regions
- 尽管这些方法很受欢迎,但是$bottom-up~approach$存在潜在的问题
- man-made环境不能保证检测到可靠几何性质——纹理很差、特殊表面
- 检测到的几何特性,存在大量不相关单特征和异常值,使得基于几何特性的分组非常困难
- 本文提出了一种不同的方法恢复3D plane,这种方法不依赖于对 low-level geometric primitives(线段、小图像块) 的分组。
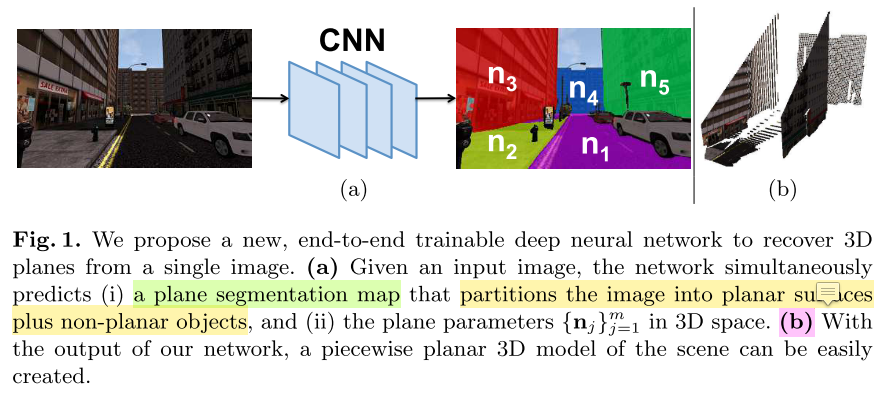
- 设计了一个端到端的神经网络,直接识别场景中的 planar surfaces,如最上面的图片所示,网络
- 输入:单幅rgb图片
- 输出:
- segmentation map that identifies the planar surfaces in the image
- the parameters of each plane in the 3D space
- 遇到的挑战是缺乏大规模带标注的3D planes数据集,为了避免投入大量人工标注成本,提出了 plane structure-induced loss,将问题转化为 single image depth prediction 问题,从而利用大量现有RGB-D数据集训练神经网络,而且把数据集中的像素类别标签考虑进来。
获取标准平面标签存在的困难
-
(1)图片中的平面区域边界往往很复杂,让人工标注会费很多时间,但是训练神经网络又需要大量带标签的数据。(2)如何从图片准确抽取各个平面的3D表示参数,仍然是一个没有解决的问题。
- 一种解决思路是:利用RGB-D数据集,把像素转化成带深度值的3D表面图,然后用 multi-model 拟合算法对3D表面上的点进行聚类,但这也不是一项容易的任务。
- 主要的困难是:设置一个合适的阈值,来区分一个点是不是属于一个 model instance(可理解为一个物体),该阈值的设置与选取的算法无关(听起来有点不太合理,阈值的设定和算法相关是很正常的事情)
- 为了解决这样的困难,本文使用了 SYNTHIA 数据集,该数据集提供了大量用真实图片合成的城市场景及其对应的深度图。数据集通过渲染一个城市生成,该城市在Unity开游戏平台上开发,所以得到的深度地图是不带噪声的(noise-free)。为了从3D点云检测到平面,本文利用了多模态拟合方法——J-Linkage。该方法与 RANSAC 相似,是基于采样一致性的方法。
- J-Linkage 一个关键的参数是 $\epsilon$,控制模型 hypothesis 和对应hypothesis数据点的最大距离
-
下图是设置不同 J-Linkage 生成平面分割图的效果
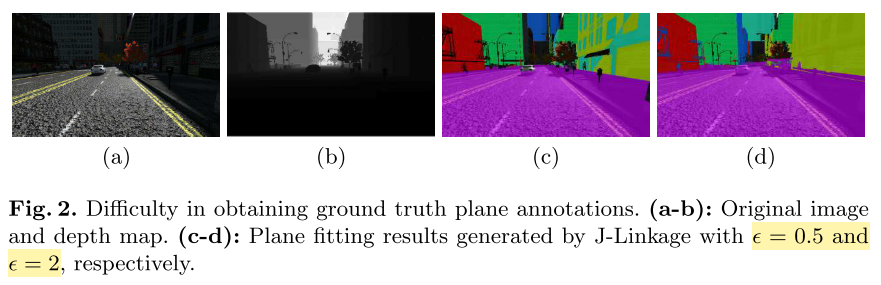
- 作者用大段落举这个例子,是想说明这种方法得到的平面标注数据质量并不很高,再用来训练神经网络容易学到错误的信息,目的是下文引出自己的方法,文章写作技巧很高
Plane Structure-Induced Loss
- 上文阐述了获得可靠数据标签的挑战,这使得本文另辟蹊径,开发了另一方法进行3D平面恢复。有一个具体的问题:是否可以利用大规模的RGB-D / 3D 数据集,训练神经网络识别平面等几何结构,于此同时不需获取几何结构的ground truth标签?
- 一个重要的想法是:如果能从图片恢复出3D平面,那么就能用这些平面(部分地)解释场景的几何性质 —— 通常用3D点云表示
-
${I_i, D_i}_{i=1}^n$ n 个数据对 $\sim$ (RGB image, depth map),相机内参K已知,对于数据集中所有图片都相同
- 图片 $I_i$ 的像素 $\textbf{q} = [x, y, 1]^T$,它对应的3D点
- \[Q = D_i(\textbf{q}) \cdot K^{-1} \textbf{q}\]
- 三维向量 $\textbf{n} \in \mathbb{R}$ 表示场景中的一个平面
- 如果 $Q$ 位于该平面,则有 $\textbf{n}^T Q = 1$
- 基于以上观测,假设图片 $I_i$ 有 $m$ 个平面,本文的目标是训练一个神经网络输出:
- 每个像素的概率图 $S_i$,$S_i(\textbf{q})$ 是个(m+1)维的向量,其中第$j$个元素 $S_i^j(\textbf{q})$ 表示像素 $\textbf{q}$ 属于第$j$个平面的概率
- 图片 $I_i$ 所有的平面参数 \(\Pi_i = \{\textbf{n}_i^j\}_{j=1}^{m}\),最小化目标函数
- \[\mathcal{L} = \sum_{i=1}^n \sum_{j=1}^m \left( \sum_{\textbf{q}} S^j_i(\textbf{q}) \cdot | (\textbf{n}_i^j)^TQ - 1 | \right) + \alpha \sum_{i=1}^n \mathcal{L}_{reg}(S_i)\]
- $\mathcal{L}_{reg}(S_i)$ 是正则化项,阻止网络生成平凡解 —— $S_i^0(\cdot) \equiv 1$,这样会把所有像素划分成 non-planar,$\alpha$ 是平衡因子
- 上式把 plane segmentation 和 plane parameter estimation 统一考虑,与用两种监督信息分别训练网络的方法不同
- 以上公式,$ |(\textbf{n}_i^j)^TQ - 1| $ 衡量了图像$I_i$中第j个平面的3D点$Q$的偏差,又直到$Q$必在射线 $\lambda K^{-1} \textbf{q}$上,$\lambda$ 是$\textbf{q}$的深度值。若点$Q$又在第$j$个平面,则有
- \[(\textbf{n}_i^j) \cdot K^{-1} \textbf{q} = 1 \Rightarrow \lambda = \frac{1}{(\textbf{n}_i^j) \cdot \lambda K^{-1} \textbf{q}}\]
- 因此,$\lambda$ 可看作点$\textbf{q}$在平面$(\textbf{n}_i^j)$的深度值
- 基于以上推导,有如下等式成立
- \[\|(\textbf{n}_i^j)^TQ - 1 \| = \|(\textbf{n}_i^j)^T D_i(\textbf{q}) \cdot K^{-1} \textbf{q} - 1 \|\]
- 可以看到,上式计算 $D_i(\textbf{q})$ 和 $\lambda$ 的差异,惩罚差异项
- 因此,本文把 3D plane recovery 看成一个深度估计问题
Incorporating Semantics for Planar/Non-Planar Classification
- 这部分主要考虑正则项 $\mathcal{L}_{reg}(S_i)$。出发点是希望预测的平面能尽可能反映场景的几何性质,因此 \(\mathcal{L}_{reg}(S_i)\) 要鼓励 plane prediction——通过交叉熵损失函数
- 令 $p_{plane}(\textbf{q}) = \sum_{j=1}^m S_i^j(\textbf{q})$
- \[\mathcal{L}_{reg}(S_i) = \sum_{\textbf{q}} -1 \cdot \log(p_{plane}(\textbf{q})) - 0 \cdot \log(1 - p_{plane}(\textbf{q}))\]
- 损失函数的设计有效鼓励神经网络解释图像中的每个像素——使用预测平面模型
- 实际情况中,一些物体比另外的更可能形成有意义的平面,比如建筑物的正面,于此同时行人、汽车被看作 non-planar
- 进一步,能否把这样的高层语义信息考虑进来,提高 planar 和 non-planar 的分类能力
- 基于上文介绍,提出了利用数据集中的语义标签的方法,以 SYNTHIA 为例
- 该数据集提供了13类城市场景的像素集语义标签信息
- 把这些类分成
- planar = {building, fence, road, sidewalk, lane-marking}
- non-planar = {sky, vegetation, pole, car, traffic signs, pedestrians, cyclists, miscellaneous}
- 这种划分不固定,与问题和数据集相关
- 令 $z(\textbf{q}) = 1$, 当 $\textbf{q}$ 属于 planar类别;否则 $z(\textbf{q}) = 0$,重写损失函数
- \[\mathcal{L}_{reg}(S_i) = \sum_{\textbf{q}} -z(\textbf{q}) \cdot \log(p_{plane}(\textbf{q})) - (1-z(\textbf{q})) \cdot \log(1 - p_{plane}(\textbf{q}))\]
- 因此,就把经过人工标注的高层语义利用了起来,并和传统的geometric methods设定阈值区分 planar 和 non-planar 的方法区分开来
Network Architecture
-
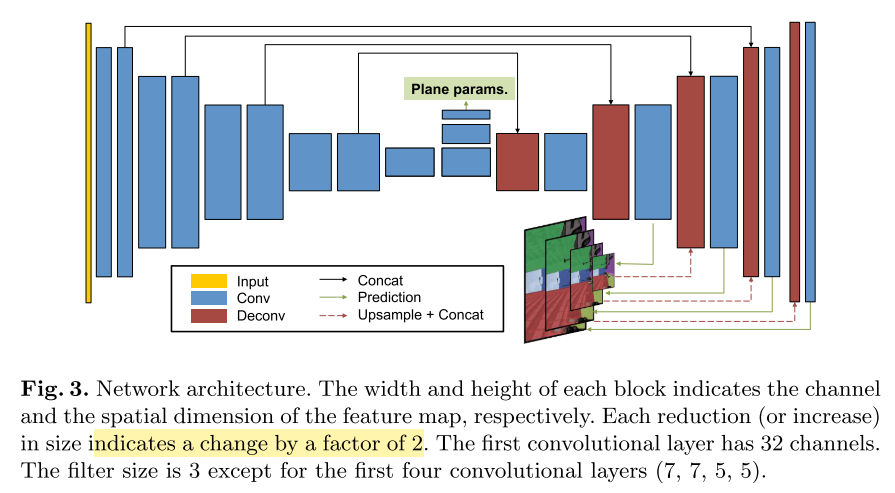
本文采用的是 $fully ~convolutional ~network$(FCN)——已知的模型在语义分割任务取得了好的效果,用2个预测分支同时估计 plane segmentation map 和 plane parameters
- Plane segmentation map
- 采用 encoder-decoder 架构,与DispNet相似
- decoder的输入一部分来自encoder
- 最后的输出层采用 softmax function,其他层激活函数均使用了 ReLU
- Plane parameters
- 与segmentation分支共享高层特征图
- 由2个 stirde=2 的卷积层(3x3x512)组成
- 后接一个 1 x 1 x 3$m$ 的卷积层输出 $m$ 个平面的参数
- 后接一个 global average pooling,对所有空间位置的预测 aggregate
- 除了最后的输出层,其他层激活函数均使用了 ReLU
- Implementation details
- 网络从头训练
- 平面的个数 $m$ 设置为 5
实验
本文声称,在GTX 1080 Ti GPU上,测试速度能达到 60 $fps$,还是相当快了,我好奇神经网络也能运行如此之快?
- 数据集:
- SYNTHIA
- more than 200,000 photo-realistic images rendered from virtual city environments with precise pixelwise depth maps and semantic annotations
- Since the dataset is designed to facilitate autonomous driving research, all frames are acquired from a virtual car as it navigates in the virtual city.
- seven different scenarios in total, we select three ones scenarios.
- we randomly sample 8,000 frames as the training set and another 100 frames as the testing set.(第一感觉是测试集太小)
- Cityscapes
- a large set of real street-view video sequences recorded in different cities
- 3,475 images with publicly available fine semantic annotations
- the depth maps in Cityscapes are highly noisy because they are computed from stereo correspondences.
- Therefore, to identify planar surfaces in the image, we manually label the boundary of each plane using polygons, and further leverage the semantic annotations to refine
- we randomly select 100 images for testing, and use the rest for training(第一感觉是测试集太小)
- SYNTHIA
- 评价任务
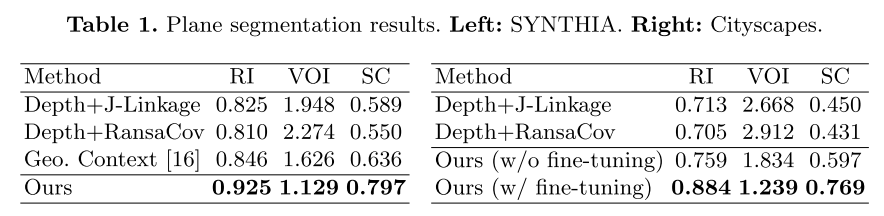
- plane segmentation
- 指标:
- Rand Index(RI)
- Variation of Information(VOI)
- Segmentation Covering(SC)
- 指标:
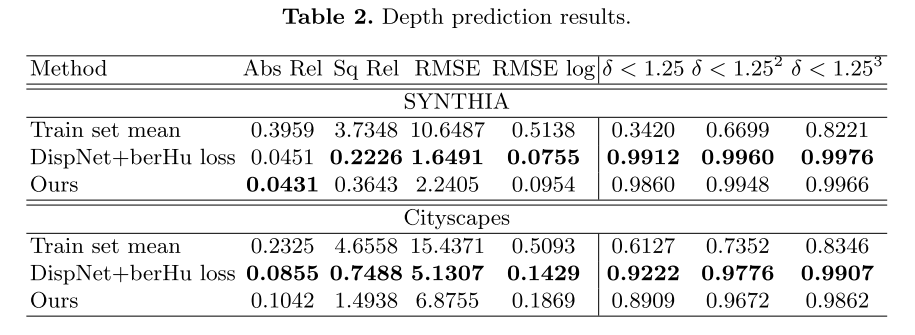
- depth prediction
- 指标
- RMSE;其他几项指标没明白什么意思
- 指标
- plane segmentation