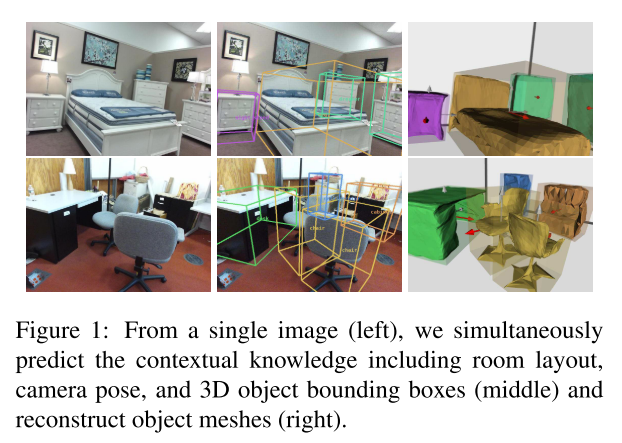
这篇论文研究的问题是从单张RGB图片,运用深度学习的方法,同时建模室内布局,物体姿态和Mesh,取得了较好的效果。这篇文章是对其他工作的follow, 之前NeurIPS/ECCV出现过研究同样问题的文章,有必要同时看一下,弄清楚一些来龙去脉。
-
论文作者:Yinyu Nie, Xiaoguang Han, Shihui Guo, Yujian Zheng, Jian Chang, Jian Jun Zhang(伯恩茅斯大学、港中文、深圳大数据研究所、厦大)
-
收录情况:CVPR 2020
主要方法
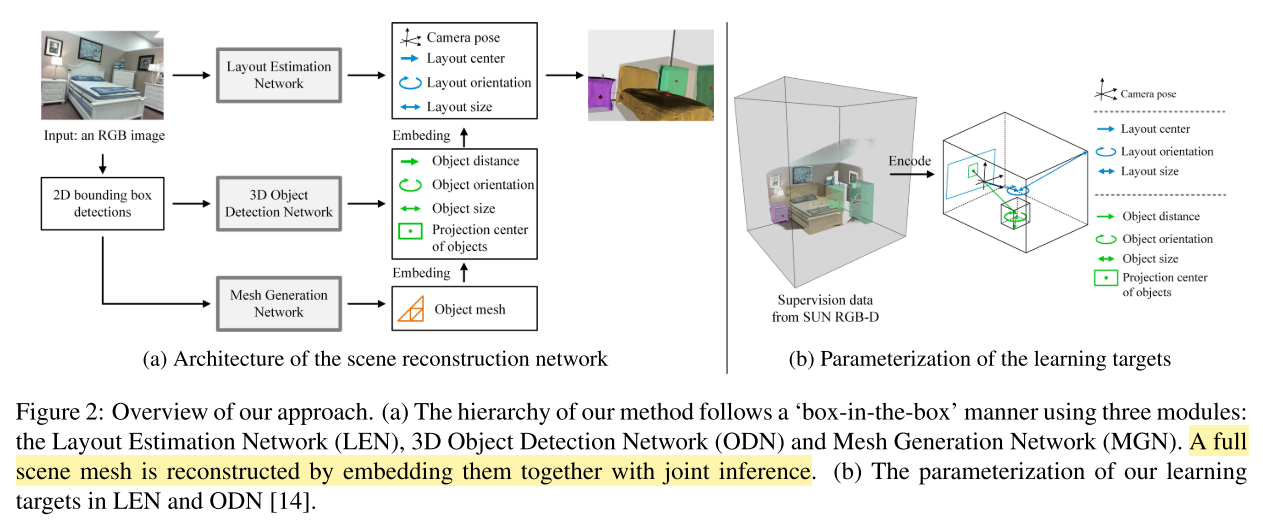
- 3D Object and Layout Estimation
- 让世界坐标系和相机坐标系一致,y-axis 垂直于地面,x-axis 指向相机
- 相机不一定静止,后面可能运动,这里只是说让二者开始保持一致,我是这么理解的
- 因此,相机姿态可以用$\textbf{R}(\beta, \gamma)$表示,$\beta$表示pitch角,$\gamma$表示roll角
- 世界坐标系中,物体的3D bbox的中心点$\textbf{C} \in \mathbb{R}^3$,尺寸$\textbf{s} \in \mathbb{R}^3$,朝向$\theta \in [-\pi, \pi]$
- 对于室内的物体(???为什么还分室内室外),3D中心$\textbf{C}$ 表示成像平面2D投影 $\textbf{c} \in \mathbb{R}^2$,物体到相机平面的距离 $d \in \mathbb{R}$
- 给定相机内参矩阵$\textbf{K} \in \mathbb{R}^{3 \times 3}$(原文把内参矩阵搞成了一个向量,写的不对),$\textbf{C}$ 可以表示成(相机投影模型的变形)
- \[\textbf{C} = \textbf{R}^{-1}(\beta, \gamma) \cdot d \cdot \frac{\textbf{K}^{-1}[\textbf{c}, 1]^{T}}{\parallel \textbf{K}^{-1}[\textbf{c}, 1]^{T} \parallel_{2}}\]
- 2D 投影中心 $\textbf{c}$ 由两部分组成
- $\textbf{c}^{b}$,bbox 中心点
- \(\boldsymbol{\delta} \in \mathbb{R}^2\),偏移量
- 从2D detection $\textbf{I}$到 3D box corners(???这些描述不太准确吧),网络进行了$\textbf{F}$变换
- \[\textbf{F}(\textbf{I} | \boldsymbol{\delta}, d, \beta, \gamma, \textbf{s}, \theta) \in \mathbb{R}^{3 \times 8}\]
- 3D Object Detection Network 预测 \((\boldsymbol{\delta}, d, \textbf{s}, \theta)\)
- Layout Estimation Network 预测 $\textbf{R}(\beta, \gamma)$ 和 $(\textbf{C}, \textbf{s}^{l}, \theta^{l})$
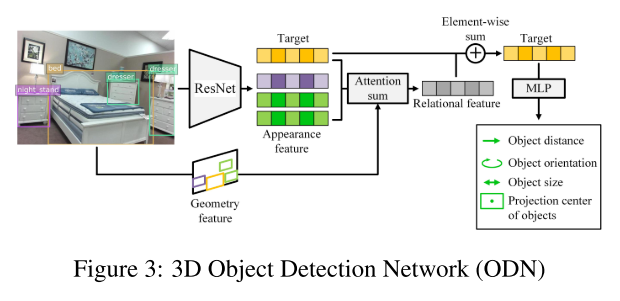
- Object Detection Network(ODN)
-
-
本文认为每个物体与周围环境有 multi-lateral 的关系,所以预测物体边界框是要考虑室内所有物体
- ODN模块设计时受到了别人的启发:2D 物体检测时,使用 attention 机制能提升效果;所以增加了 Attention sum
- 参考的论文是:$Relation~networks~for~object~detection{*}$. CVPR 2018
- 3D 物体检测时
- (1) 根据2D检测结果,用 ResNet-34 抽取物体 appearance feature;编码 2D bbox的相对位置和尺寸信息 $\Rightarrow$ geometry feature
- (2) 对于每个 target object(???理解成当前正在计算的 object),计算与其他物体的 relational feature,计算的方法同样参考了 $^{*}$ 中的 $\textbf{object relation module}$
- 从上图可以看出,target object feature 和 relational feature 采用的是元素级别的加法,形成组织target object特征
- (3) 最后用两层的MLP,预测 \((\boldsymbol{\delta}, d, \textbf{s}, \theta)\)
- 本文认为:对于室内场景重建,$\textbf{object relation module}$ 反映了现实世界中固有的性质——物体与其他物体有着相邻、相似关系
-
- Layout Estimation Network(LEN)
- 这部分网络架构与 ODN 相同,只是不带 relational feature,预测
- camera pose:$\textbf{R}(\beta, \gamma)$
- 整个场景的布局 3D box:$(\textbf{C}, \textbf{s}^l, \theta^{l})$
- 这部分网络架构与 ODN 相同,只是不带 relational feature,预测
- 让世界坐标系和相机坐标系一致,y-axis 垂直于地面,x-axis 指向相机
- Mesh Generation for Indoor Objects(MGN)
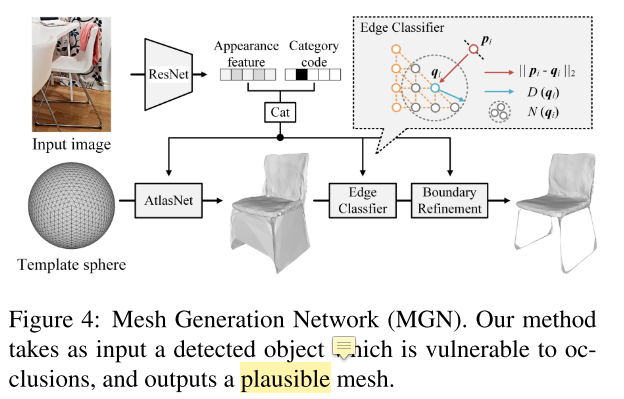
- 输入:(1)检测的物体类别(2)ResNet-18 产生的物体特征
- 输出:object mesh
- 把输入进行编码,结合 Template sphere,用AtlasNet产生初步的 object mesh
- edge classifier 用一个二分类函数移除 redundant meshes
-
boundary refinement module 【参考文献30】对 boundary 进行平滑,产生 final object mesh
-
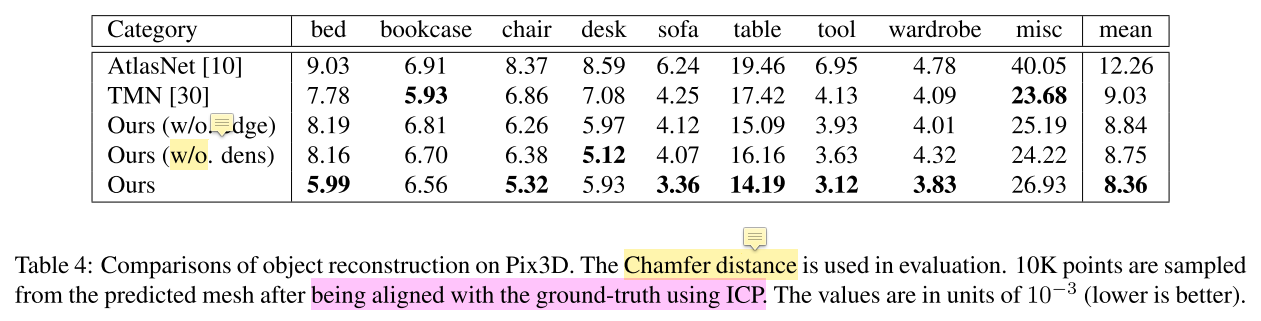
这部分也是在前人基础上的改进,前人的方法称为TMN:Deep mesh reconstruction from single rgb images via topology modification networks. CVPR 2019
-
TMN 通过变形、修改 MESH 拓扑近似物体形状,其中需要预定义的距离阈值来从目标形状中移除分离的面(detached faces)。
-
本文认为TMN定义 threshold 存在问题,因为 object mesh 的尺度不尽相同,而且方差很大,此外还有北京、遮挡引起的尺度估计错误
- 本文认为应该通过 local geometry 决定是否保留一个面。提出一种可调整的方法来修改基于 ground truth local density 的mesh
- $\textbf{p}_i \in \mathbb{R}^{3}$ 是重建的mesh上的一点
- $\textbf{q}_i \in \mathbb{R}^{3}$ 是ground truth mesh上离$\textbf{p}_i$最近的邻居点
- 设计了一个二分类器 $f(*)$ 预测 $\textbf{p}_{i}$ 是否与 ground truth mesh 接近
- \(N(\textbf{q}_{i})\) 是 \(\textbf{q}_{i}\) 在 ground truth mesh 的邻居
- \(D(\textbf{q}_{i})\) 是 \(\textbf{q}_{i}\) 的 local density
- 关键是理解 \(f({p}_{i})\) 和 \(D(\textbf{q}_{i})\) 两个式子的含义,后一个没完全理解
- 分类器的设计思路:
- mesh 形状估计时,如果一个点属于 ground truth 的邻居 $N(*)$,模板上的这个点应该被保留,后续实验表明这种方法优于TMN单一阈值设置的方法
- 本文认为TMN移除 faces 的方式存在问题,转向移除 mesh edges 的思路
- 移除 伪正边 能降低不正确的 connections,这些connections会被 edge loss 惩罚(参见文献【50】)
- 用二分类器 $f(*)$ 在 mesh edges 上随机采样点,如果该点的 average classification score低,就把该点所在的 edges 去除(???怎么判断点在哪条边,一个点可以在无穷条边上)
- Joint Learning for Total 3D Understanding
-
这部分讲解学习目标和损失函数
- Individual Loss
-
ODN 预测相机坐标系下的3D box,\((\boldsymbol{\delta}, d, \textbf{s}, \theta)\)
-
LEN 预测layout box,$(\beta, \gamma, \textbf{C}, \textbf{s}^l, \theta^{l})$,把相机姿态和3D物体变换到世界坐标系
- 分类和回归(长度和角度)损失函数(见这篇论文中的实现细节:直接回归角度误差会很大,先分类到一个区间范围,再回归)
- $\mathcal{L}^{cls,reg} = \mathcal{L}^{cls} + \lambda_r \mathcal{L}^{reg}$ 优化 $(\beta, \gamma, \textbf{s}, \textbf{s}^l, \theta, \theta^{l})$
- 【参考文献14】
-
L2 loss 预测 $\textbf{C}$ 和 \(\boldsymbol{\delta}\)
-
Chamfer loss for MGN
-
edge loss $\mathcal{L}_e$
-
boundary loss $\mathcal{L}_b$
- cross entropy loss $\mathcal{L}_{ce}$ 分类 edges in mesh modification
-
- Joint Loss
-
思路:(1)相机姿态估计应该和3D object detection相互促进(2)object meshes应该和3D object detection相互促进
-
对于第一点,采用 cooperative loss $\mathcal{L}_{co}$
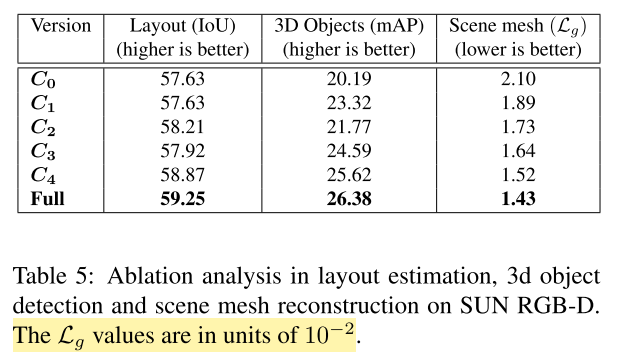
- 对于第二点,采用 global loss $\mathcal{L}_{g}$
- \[\mathcal{L}_{g} = \frac{1}{N} \sum_{i=1}^{N} \frac{1}{| \mathbb{S}_i |} \sum_{\textbf{q} \in \mathbb{S}_i} \min_{\textbf{p} \in \mathbb{M}_i} \parallel \textbf{p} - \textbf{q} \parallel_{2}^{2}\]
- $\textbf{p}$、$\textbf{q}$是两个点,分别位于重建的 mesh $\mathbb{M}_i$ 和 ground truth surface $\mathbb{S}_i$,$i$ 代表第$i$个物体
- $N$ 是物体总数,$| \mathbb{S}_i |$ 是 $\mathbb{S}_i$ 上的点数
-
\[\mathcal{L} = \sum_{ x \in \{\boldsymbol{\delta},d,\textbf{s},\theta\} } \lambda_{x}\mathcal{L}_x + \sum_{ y \in \{\beta,\gamma,\textbf{C},\textbf{s},\theta^{l}\} } \lambda_{y}\mathcal{L}_y + \sum_{ z \in \{c,e,b,ce,\theta^{l}\} } \lambda_{z}\mathcal{L}_z + \lambda_{co}\mathcal{L}_{co} + \lambda_{g}\mathcal{L}_g\]
- 前三项分别对应ODN、LEN、MGN的损失
- 后两项是各模块相互作用的总共损失
-
-
实验
- 数据集:
- SUN RGB-D. 10335张带有3D layout、object bbox、depth map的真实室内场景图片
- train/test split
- NYU-37 object labels for evaluation: layout、camera pose estimation、3D object detection
- Pix3D. 395 furniture models with 9 categories,包含10069张图片
- train/test split
- 用来 mesh generation 的监督
- SUN RGB-D. 10335张带有3D layout、object bbox、depth map的真实室内场景图片
- 评价指标:
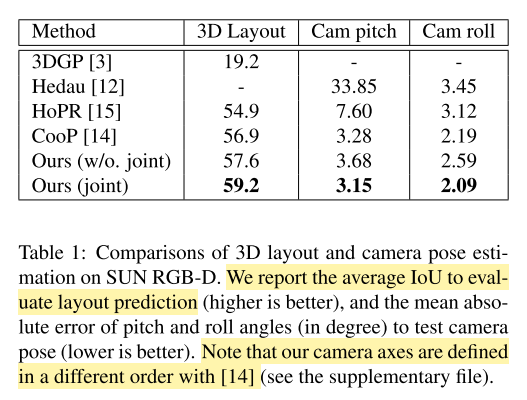
- $\textbf{3D IoU}$ for layout estimation
- $\textbf{mean absolute error}$ for camera pose
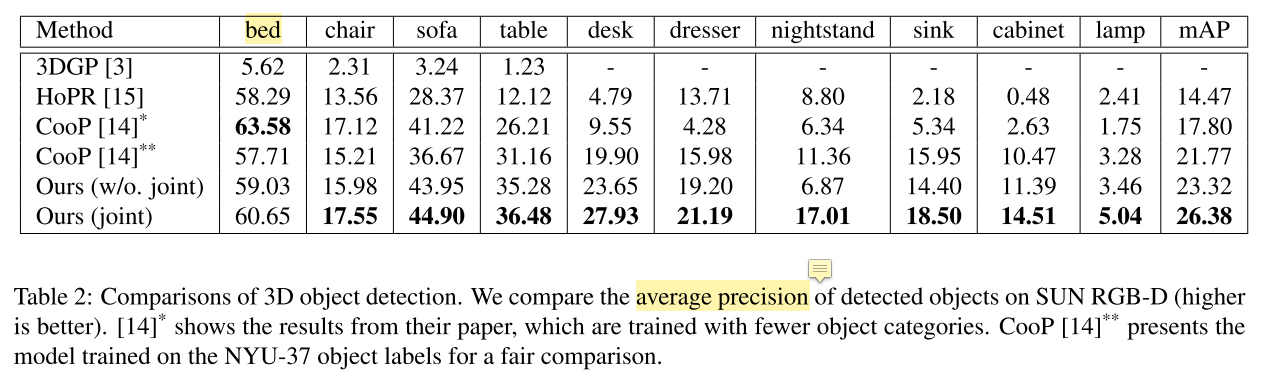
- $\textbf{mAP}$ for object detetion
- $\textbf{Chamfer distance}$ for mesh generation
- 实现细节
- 2D detector 在coco上训练,在 SUN RGB-D 调优
- MGN中的template sphere有2562个单位半径的顶点,移除边的阈值是平均分类分数低于0.2
- 分别在 SUN RGB-D训练ODN、LEN,在Pix3D 训练MGN
- 然后把 Pix3D 和 SUN RGB-D 组合起来,联合训练三个子网络,这么做是为了和单独训练做对比实验
- Qualitative Analysis
- Object Reconstruction

- Scene Reconstruction

- Object Reconstruction
- Quantitative Analysis
-
C0:without relational features (in ODN) and joint training (Baseline)
-
C1:Baseline + relational features
-
C2:Baseline + (only) cooperative loss $\mathcal{L}_{co}$ in joint training
-
C3:Baseline + (only) global loss $\mathcal{L}_{g}$ in joint training
-
C4:Baseline + joint training (\(\mathcal{L}_{g} + \mathcal{L}_{co}\))
-
Full:Baseline + relational features + joint training
-