目标检测是计算机视觉的一大研究主题,长期以来热度不减。深度学习大规模应用于视觉领域后,目标检测的研究进展飞快,例如:每年各大CV顶会论文,目标检测的主题占很大比例。随着检测准确率的提升,这方面的研究倾向于关注模型效率,追求更高的检测精度和更快的检测效率,同时往往和神经架构搜索结合,探索不同的模型架构,以适配不同的资源条件。本文介绍的这篇论文,是 Google 提出的目标检测模型 —— EfficientDet,实验表明兼具准确率和效率优势,它实际上是一个系列:共有 D0-D7 八个检测器,从最基本的 EfficientDet D0 出发,运用神经架构搜索和模型缩放技术,扩展出了 D1-D7,每种检测器的检测精度和效率不同,满足不同的资源场景的需求。
FLOPs:指整个神经网络加法和乘法的运算次数,根据网络结构求得
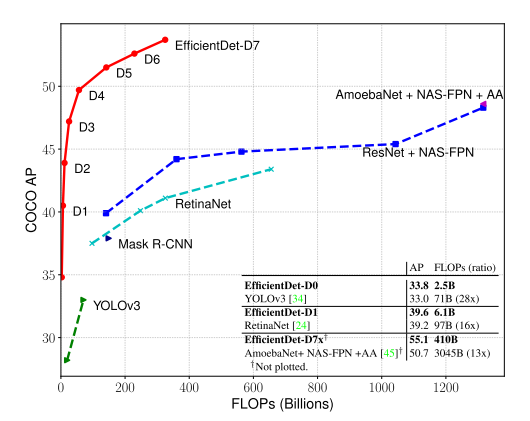
EfficientDet 一些亮点:
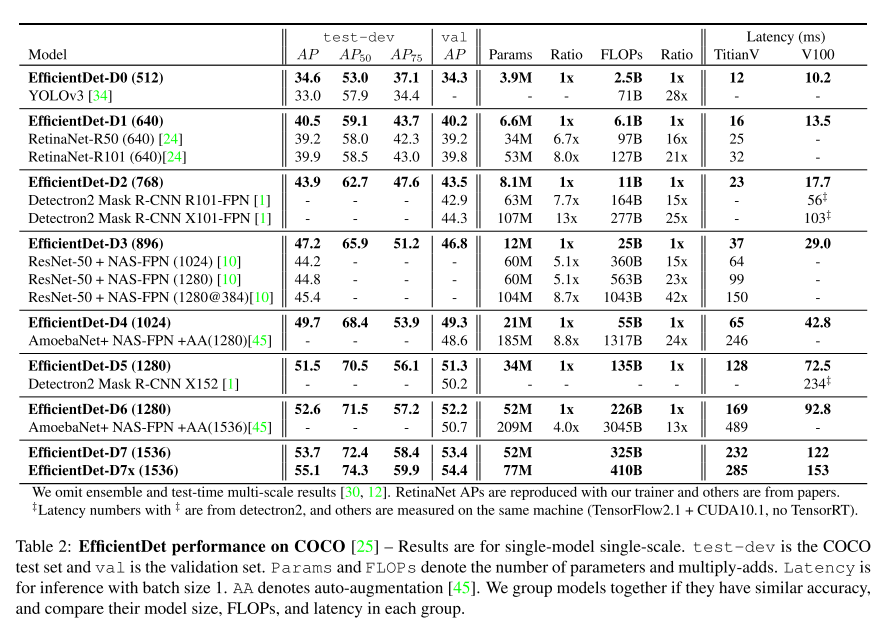
- EfficientDet-D0 uses 28x fewer FLOPs than YOLOv3
- under similar accuracy constraint
- EfficientDet-D7 achieves state-of-the-art 55.1 AP
- with 77M parameters and 410B FLOPs
- outperforming previous best detector AmoebaNet-based NAS-FPN by 4 AP
- while being 2.7x smaller and using 7.4x fewer FLOPs
论文题目:EfficientDet: Scalable and Efficient Object Detection
论文作者:Mingxing Tan Ruoming Pang Quoc V. Le (from Google Research, Brain Team)
简介
目标检测模型在检测准确度方面有了很大进步,但随之而来的问题是模型结构越来越复杂、参数越来越多、训练成本越来越昂贵,例如 AmoebaNet-based NAS-FPN detector 达到 SOTA 的检测准度时有 167M 参数,3045B 次加法和乘法运算,由于模型本身巨大的计算量和资源需求,很难实现整个系统高效运行,不适合部署在现实场景。
有一些研究工作已经在关注更加高效的网络架构,比如 one-stage detectors 、anchor-free detectors、对已有模型压缩。作者认为这些工作存在两个问题:
- 追求模型效率时,牺牲了准确率
- 提出的检测器只能在特定软硬件资源条件下工作,不能适配不同的资源场景:from mobile devices to data centers
- 我认为这个理由比较牵强,是用来写作的目的,因为有的检测器就是为了解决特定的问题,而不是大范围的问题
本文的直观想法是:能否建立一个 scalable detection architecture,兼具 higher accuracy、better efficiency,来适配不同的资源限制条件?所以本文研究的重点是:基于 one-stage detectors,检测器中backbone、feature fusion、class/box network 架构设计。面临的挑战有:
- efficient multi-scale feature fusion
- 类似的工作 FPN、PANet、NAS-FPN,说明这块很重要
- 我觉得更多是为了呼应提出的 Bi-directional Feature Pyramid Network (BiFPN)
- model scaling
- 缩放一个轻量、高准确度的网络,有助于兼顾accuracy、efficiency
- 我觉得这个是重点
整体流程:
- 用 EfficentNet 作为提取图片特征的主干网络
- EfficentNet 是一个图片分类器系列 B0-B7,经过缩放得来
- 用本文重点强调的 BiFPN 对特征进行融合
- 再输入到目标分类和边界框回归网络
相关工作
- One-Stage Detectors
- Tsung-Yi Lin, Piotr Doll´ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Focal loss for dense object detection. ICCV, 2017. 1,
- Joseph Redmon and Ali Farhadi. Yolo9000: better, faster, stronger. CVPR, 2017.
- Laurent Sifre. Rigid-motion scattering for image classifica- tion. Ph.D. thesis section 6.2, 2014.
- Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed, Cheng-Yang Fu, and Alexander C Berg. SSD: Single shot multibox detector. ECCV, 2016.
- Jonathan Huang, Vivek Rathod, Chen Sun, Menglong Zhu, Anoop Korattikara, Alireza Fathi, Ian Fischer, ZbigniewWojna, Yang Song, Sergio Guadarrama, et al. Speed/accuracy trade-offs for modern convolutional object detectors. CVPR, 2017.
- Hei Law and Jia Deng. Cornernet: Detecting objects as paired keypoints. ECCV, 2018.
- Qijie Zhao, Tao Sheng, YongtaoWang, Zhi Tang, Ying Chen, Ling Cai, and Haibin Ling. M2det: A single-shot object detector based on multi-level feature pyramid network. AAAI, 2019.
- Xingyi Zhou, Dequan Wang, and Philipp Krhenbhl. Objects as points. arXiv:1904.07850, 2019.
- Two-Stage Detectors
- Zhaowei Cai and Nuno Vasconcelos. Cascade r-cnn: Delving into high quality object detection. CVPR, pages 6154–6162, 2018.
- Ross Girshick. Fast r-cnn. ICCV, 2015.
- Kaiming He, Georgia Gkioxari, Piotr Doll´ar, and Ross Gir- shick. Mask r-cnn. ICCV, pages 2980–2988, 2017.
- Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster r-cnn: Towards real-time object detection with region proposal networks. NIPS, 2015.
- Multi-Scale Feature Representations
- perform direct predictions from pyramidal feature hierarchy extracted from backbone networks
- Zhaowei Cai, Quanfu Fan, Rogerio S Feris, and Nuno Vas- concelos. A unified multi-scale deep convolutional neural network for fast object detection. ECCV, pages 354–370, 2016.
- Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed, Cheng-Yang Fu, and Alexander C Berg. SSD: Single shot multibox detector.
- Pierre Sermanet, David Eigen, Xiang Zhang, Micha¨el Math- ieu, Rob Fergus, and Yann LeCun. Overfeat: Integrated recognition, localization and detection using convolutional networks. ICLR, 2014.
- FPN proposes a top-down pathway to combine multi-scale features
- Tsung-Yi Lin, Piotr Doll´ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Feature pyramid networks for object detection. CVPR, 2017.
- Shu Liu, Lu Qi, Haifang Qin, Jianping Shi, and Jiaya Jia. Path aggregation network for instance segmentation. CVPR, 2018.
- Peng Zhou, Bingbing Ni, Cong Geng, Jianguo Hu, and Yi Xu. Scale-transferrable object detection. CVPR, pages 528–537, 2018.
- Golnaz Ghiasi, Tsung-Yi Lin, Ruoming Pang, and Quoc V. Le. Nas-fpn: Learning scalable feature pyramid architecture for object detection. CVPR, 2019.
- Md Amirul Islam, Mrigank Rochan, Neil DB Bruce, and Yang Wang. Gated feedback refinement network for dense image labeling. CVPR, pages 3751–3759, 2017.
- perform direct predictions from pyramidal feature hierarchy extracted from backbone networks
- Model Scaling
- Mingxing Tan and Quoc V. Le. Efficientnet: Rethinking model scaling for convolutional neural networks. ICML, 2019.
- Tsung-Yi Lin, Piotr Doll´ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Focal loss for dense object detection. ICCV, 2017. 1,
- Barret Zoph, Ekin D. Cubuk, Golnaz Ghiasi, Tsung-Yi Lin, Jonathon Shlens, and Quoc V. Le. Learning data augmentation strategies for object detection. arXiv preprint arXiv:1804.02767, 2019. 1,
- Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan, Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, Quoc V. Le, and Hartwig Adam. Searching for mobilenetv3. ICCV, 2019.
- Mingxing Tan, Bo Chen, Ruoming Pang, Vijay Vasudevan, and Quoc V Le. Mnasnet: Platform-aware neural architec- ture search for mobile. CVPR, 2019.
主要方法
- BiFPN
- 对backbone抽取的特征进行融合,为什么先介绍它?我觉得是作者想强调这部分创新点,backbone部分使用的已发表的工作
- 问题定义
- 输入:a list of multi-scale features $\overrightarrow{P}^{in} = (P_{l_1}^{in}, P_{l_2}^{in}, …)$
- $P_{l_i}^{in}$ 是backbone $l_i$ 层的特征
- 输出:a list of new features $\overrightarrow{P}^{out} = f(\overrightarrow{P}^{in})$
- 目标是找到一个变换 $f$ 有效地融合不同层特征
- 输入:a list of multi-scale features $\overrightarrow{P}^{in} = (P_{l_1}^{in}, P_{l_2}^{in}, …)$
- 拿FPN举例说明
- 3-7 层是输入特征 $\overrightarrow{P}^{in} = (P_{3}^{in}, …, P_{7}^{in})$,$P_{i}^{in}$ 表示第i层的feature map,它的分辨率等于输入图片的 $1/2^i$
- 例如:输入图片的大小是 640 x 640,那么 $P_{3}^{in}$ 表示 80 x 80 的特征图 $\leftarrow$ 640/$2^3$ = 80,其他层依次类推
- FPN 集成backbone不同层特征的方式是 top-down pathway:
- $P_{7}^{out} = Conv(P_{7}^{in})$
- $P_{6}^{out} = Conv(P_{6}^{in} + Resize(P_{7}^{out}))$
- $\cdots$
- $P_{3}^{out} = Conv(P_{3}^{in} + Resize(P_{4}^{out}))$
- $Resize$ 通常是 upsampling or downsampling operation
- $Conv$ 通常是卷积操作
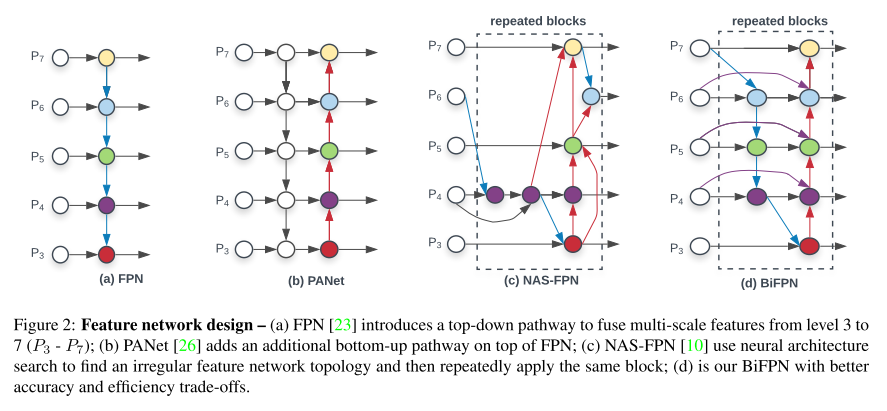
- Cross-Scale Connections —— 这一部分探究融合不同层次特征的方法,追求高的检测精度和运行速度
- 从FPN的结构看出,信息流是从上到下的,也就是说单向的
- PANet 提出双向特征融合的方法,既有从上到下的信息流,也有从下到上的
- NAS-FPN [10] 采用神经架构搜索的方式,选取较优的特征融合方式
- 需要费很多时间、动用许多GPU设备,才可能找到好的架构
- 搜索结果可解释性差
- 本文提出的 BiFPN,作了几点改进
- 移除只有一条入边的结点,作者这样的结点贡献很小,当然删除后无疑简化了网络:??不太清楚以什么网络为基础,以及如何做这样的操作
- 同层的输入、输出结点,增加一条边:类似 skip connection 的操作
- unlike PANet [26],把每个 bidirectional (top-down and bottom-up) path 当作特征融合的一层或一个block,然后repeat the same layer multiple times
- Weighted Feature Fusion
- 通常的特征融合方法,没有区别每层的输入特征对输出的贡献,本文认为应该区别对待,即对每层特征加权,加权的方式有几种:
- unbounded fusion:$O = \sum_{i} w_i \cdot I_i$,$w_i$ 是个可学习的权重,具体可以是标量(per-feature)、向量(per-channel)、多维Tensor(per-pixel)。本文认为采用标量的形式,达到的效果与其他形式类似。但是标量的取值范围变化很大 —— 可以是非常大的值、非常小的值,因此要采用归一化的权重。(??不明白说这些有什么用,大家都懂,而且本文没采用这种方式加权特征)
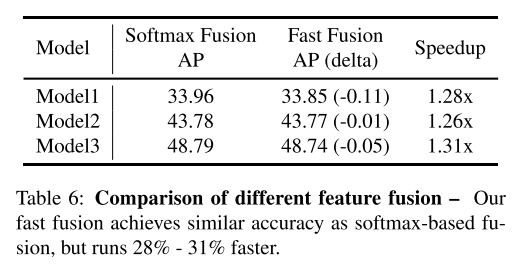
- softmax-based fusion: $O = \sum_{i} \frac{e^{w_i}}{\sum_{j}e^{w_j}} \cdot I_i$,相当于对归一化做的变形,这种方式的问题是计算量很大,会降低模型效率
- fast normalized fusion: $O = \sum_{i} \frac{w_i}{\epsilon + \sum_{j}w_j}$,$\epsilon$ = 0.0001,其实没有多大改变,就是关注到了很多细节之处。
- 后面的实验表明 fast normalized fusion 这样做提高了模型运行效率
- As a concrete example, here we describe the two fused features at level 6 for BiFPN
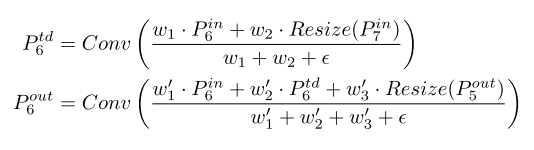
- $P^{td}_{6}$ is the intermediate feature at level 6 on the top-down pathway
- and P^{out}_6 is the output feature at level 6 on the bottom-up pathway
- 为了进一步提高效率(从这里来看,这篇论文写作技巧很好,到处强调自己的东西,把使用前人的工作的描述放在边边角角)
- use depthwise separable convolution [7, 37] for feature fusion
- and add batch normalization and activation after each convolution
- EfficientDet
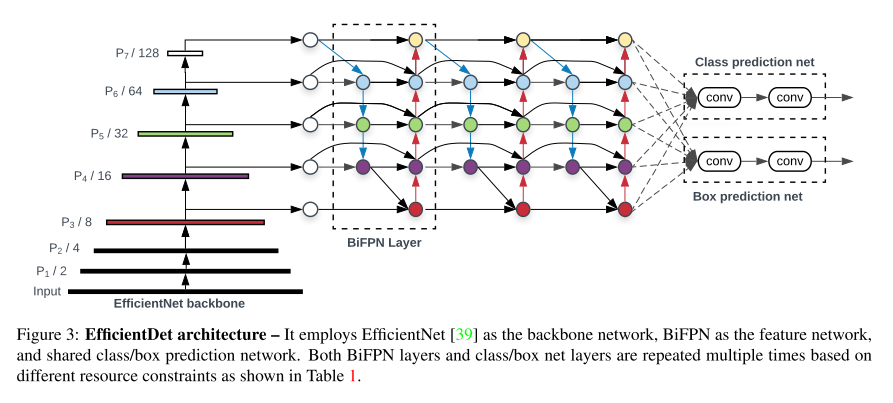
- Architecture
- ImageNet-pretrained EfficientNets as the backbone network
- BiFPN as feature network,输入是 backbone L3-7 的特征
- features are fed to a class and box network to produce object class and bounding box predictions
- 物体类别预测、物体边界框回归两个网络,共享所有层的特征
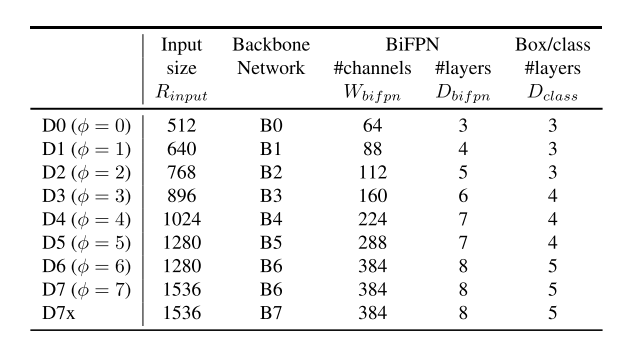
- Compound Scaling
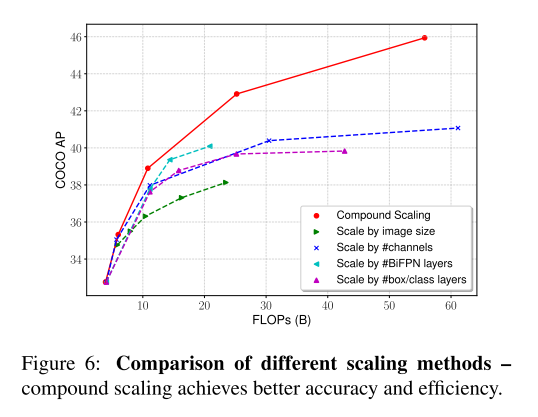
- 之前的缩放方法:堆叠 FPN layer、使用更大的backbone,对模型效率不够好
- 本文受 EfficientNets 启发,设定一个 compound coefficient $\phi$,同时缩放 all dimensions of backbone , BiFPN, class/box network, and resolution.
- Backbone network
- 复用 width/depth scaling coefficients of EfficientNet-B0 to B6
- EfficientNet 是在ImageNet上训练的,学习到了大量常见物体的特征
- BiFPN network
- 线性增加 BiFPN 的深度 $D_{bifpn}$(#layers) $\leftarrow$ 网络深度需要是整数
- 指数增加 BiFPN 的宽度 $W_{bifpn}$(#channels) $\leftarrow$ 与EfficientNet的操作类似
- 因此,$ W_{bifpn} = 64 \cdot (1.35^\phi)$,$D_{bifpn} = 3 + \phi$
- 1.35 是从 {1.2, 1.25, 1.3, 1.35, 1.4, 1.45} 网格搜索得到
- Box&Class prediction network
- 让网络宽度与BiFPN保持一致,线性增加深度 $\rightarrow$ $D_{box} = D_{class} = 3 + \lfloor \phi/3 \rfloor$
- input image resolution
- 线性增加分辨率,$R_{input} = 512 + \phi \cdot 128$;由于之前BiFPN的设计,为了让分辨率能被 $2^7$ 整除
- 至此,变换不同的 $\phi$,就能得到一系列不同架构的检测器
- Architecture
实验
- EfficientDet for Object Detection
- 数据集:
- COCO 2017 detection datasets [25] with 118K training images
- report accuracy for both test-dev (20K test images with no public ground-truth) and val with 5K validation images
- 数据集:
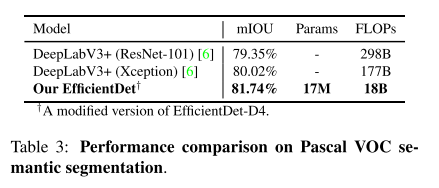
- EfficientDet for Semantic Segmentation
- 主要是为目标检测设计的,这里是为了看语义分割的效果
- modify EfficientDet model to keep feature level {P2, P3, …, P7} in BiFPN, but only use P2 for the final per-pixel classification
- only evaluate a EfficientDet-D4 based model, which uses a Ima- geNet pretrained EfficientNet-B4 backbone (similar size to ResNet-50)
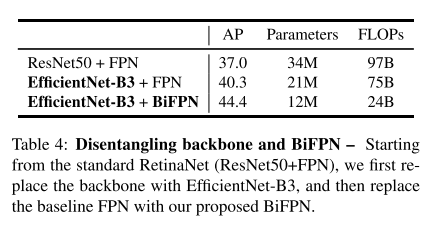
- Ablation Study
- all accuracy results here are for COCO validation set
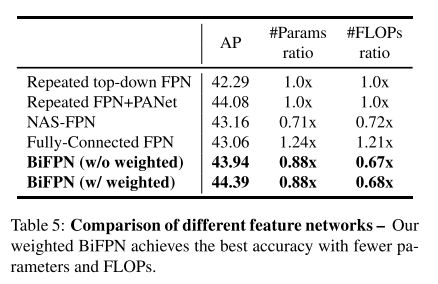
- Disentangling Backbone and BiFPN
- BiFPN Cross-Scale Connections
- Softmax vs. Fast Normalized Fusion
- Compound Scaling
总结与讨论
- 这篇论文告诉我们
- 选取一个好的 base backbone,同时缩放网络宽度、深度、输入图片分辨率,要由于单独缩放其中的某些量
- BiFPN 架构优于 FPN 和 NAS-FPN