这篇博客分享的是 CVPR 2016 的一篇论文,该论文研究自动驾驶场景中物体3D检测问题。从时间上来看该文算是自动驾驶3D物体检测 比较早的研究了,其中的方法在当时来看比较前沿,但是现在看有点老旧——部分模块还在用SVM等机器学习模型,因为这个领域的进展非常快,每年都会涌现大量文章,清一色基于深度学习模型。选择分享这篇文章,是因为它比较经典,引用量达接近400 —— 后续文章在做介绍和对比试验的时候不约而同提到了它。
论文标题:Monocular 3D Object Detection for Autonomous Driving
论文作者:Xiaozhi Chen, Kaustav Kundu, Ziyu Zhang, Huimin Ma, Sanja Fidler, Raquel Urtasun(来自清华大学、多伦多大学)
简介
当前(本文指2016年之前的几年),自动驾驶系统大部分依赖于雷达和人工标注的地图,本文关注从单目图像进行2D和3D物体检测。最近的目标检测工作流程,习惯上先生成各式各样的 object proposals,这样做的好处有两个:一是避免没有目的地全部搜索从而加速计算,二是能提高物体检测召回率。本文沿用了这样的思路。
生成 object proposal 的方法,有下面几类:
- over-segment the image into superpixels and group these using several similarity measures [45, 2]
- explore an exhaustive set of windows using simple “objectness” features [1, 11], or contour information
- recent works learn how to propose promising object candidates using
- ensembles of binary segmentation models [27]
- parametric energies [29]
- window classifiers based on CNN features [18]
这些方法在 PASCAL VOC 数据集上展示出了较好的效果,也就是说在2D检测方面表现良好,但是放到自动驾驶场景 —— KITTI数据集,之前表现好的方法就落后许多了。当前KITTI数据集上表现最好的是 Chen et al. 提出的方法,用双目图像生成3D object proposals。
本文的方法与此类似,利用单目图片上下文和语义信息,让模型学习生成 class-specific 3D object proposals。这些 proposals 通过详尽地把3D BBox 放到地平面并用简单有效的图片特征对它们打分的方式生成,图片特征包括:物体类别语义,物体实例语义,物体形状、位置,物体上下文(指物体外加所在地面)。实验表明该模型在KITTI数据集达到了单目图像SOTA,与双目效果接近。
相关工作
- Object Proposal Generation
- RGB
- K. Van de Sande, J. Uijlings, T. Gevers, and A. Smeulders. Segmentation as selective search for object recognition. In ICCV, 2011.
- L. Zitnick and P. Doll´ar. Edge boxes: Locating object proposals from edges. In ECCV. 2014.
- J. Carreira and C. Sminchisescu. Cpmc: Automatic object segmentation using constrained parametric min-cuts. PAMI, 34(7):1312–1328, 2012.
- P. Arbelaez, J. Pont-Tusetand, J. Barron, F. Marques, and J. Malik. Multiscale combinatorial grouping. In CVPR. 2014.
- M. Cheng, Z. Zhang, M. Lin, and P. Torr. BING: Binarized normed gradients for objectness estimation at 300fps. In CVPR, 2014.
- T. Lee, S. Fidler, and S. Dickinson. A learning framework for generating region proposals with mid-level cues. In ICCV, 2015.
- RGB-D
- D. Banica and C. Sminchisescu. Cpmc-3d-o2p: Semantic segmentation of rgb-d images using cpmc and second order pooling. In CoRR abs/1312.7715, 2013.
- S. Gupta, R. Girshick, P. Arbelaez, and J. Malik. Learning rich features from RGB-D images for object detection and segmentation. In ECCV. 2014.
- D. Lin, S. Fidler, and R. Urtasun. Holistic scene understanding for 3d object detection with rgbd cameras. In ICCV, 2013.
- A. Karpathy, S. Miller, and L. Fei-Fei. Object discovery in 3d scenes via shape analysis. In ICRA, 2013.
- Video
- D. Oneata, J. Revaud, J. Verbeek, and C. Schmid. Spatio-temporal object detection proposals. In ECCV, 2014.
- learn to propose objects
- T. Lee, S. Fidler, and S. Dickinson. A learning framework for generating region proposals with mid-level cues. In ICCV, 2015.
- P. Kr ahenb uhl and V. Koltun. Geodesic object proposals. In ECCV, 2014.
- P. Kr ahenb uhl and V. Koltun. Learning to propose objects. In CVPR, 2015.
- A. Ghodrati, A. Diba, M. Pedersoli, T. Tuytelaars, and L. V. Gool. Deepproposal: Hunting objects by cascading deep convolutional layers. In arXiv:1510.04445, 2015.
- RGB
- 3D Object Detection
- X. Chen, K. Kundu, Y. Zhu, A. Berneshawi, H. Ma, S. Fidler, and R. Urtasun. 3d object proposals for accurate object class detection. In NIPS, 2015.(双目)
- M. Zia, M. Stark, and K. Schindler. Towards scene understanding with detailed 3d object representations. IJCV, 2015.
- B. Pepik, M. Stark, P. Gehler, and B. Schiele. Multi-view and 3d deformable part models. PAMI, 2015.
- P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained part based models. PAMI, 2010.(DPM)
- S. Fidler, S. Dickinson, and R. Urtasun. 3d object detection and viewpoint estimation with a deformable 3d cuboid model. In NIPS, 2012.
- E. Ohn-Bar and M. M. Trivedi. Learning to detect vehicles by clustering appearance patterns. IEEE Transactions on Intelligent Transportation Systems, 2015.(visual and geometric information)
- C. Long, X. Wang, G. Hua, M. Yang, and Y. Lin. Accurate object detection with location relaxation and regionlets relocalization. In ACCV, 2014.
- S. Wang, S. Fidler, and R. Urtasun. Holistic 3d scene understanding from a single geo-tagged image. In CVPR, 2015.
- Y. Xiang, W. Choi, Y. Lin, and S. Savarese. Data-driven 3d voxel patterns for object category recognition. In CVPR, 2015.(3DVP)
主要方法
- 模型整体结构
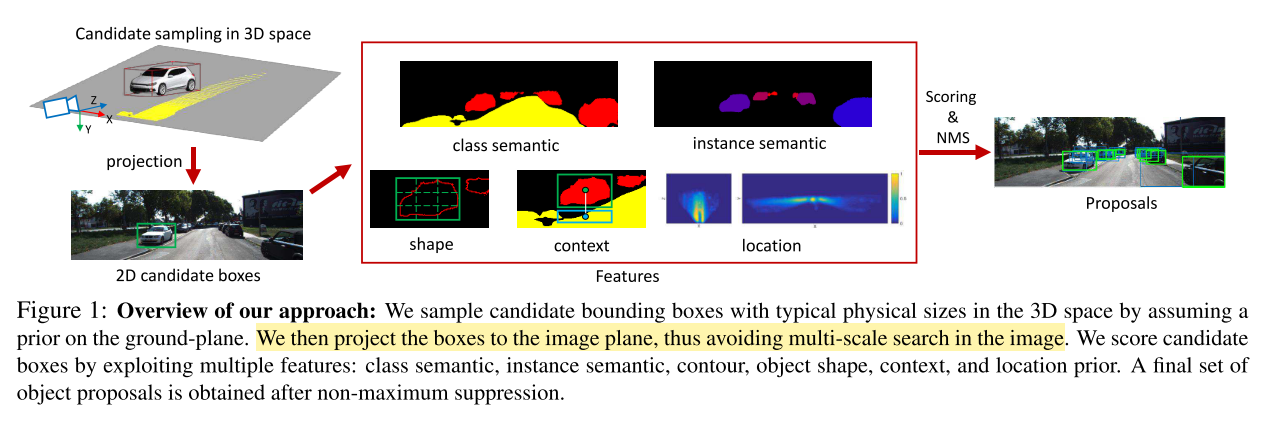
- 红色箭头
projection这一步,我理解的是把3D投影到2D,就可以利用图片信息了,中间红色大方框正是图片的各种特征,然后用评分方法给出proposal得分,后续用NMS处理 - 问题是:上面的操作都在2D图片上进行,最后怎么得到3D Proposals??扩展的方法是什么??
- 注意:这里仅是生成 3D proposals,还不是 3D BBox,生成 3D BBox 使用了前人的方法,并不是本文的创新
- 红色箭头
- Generating 3D Object Proposals
- 物体的形式化定义:$ \textbf{y} = (x, y, z, \theta, c, t) $
- $(x, y, z)$ 是3D BBox中心
- $\theta$ 是物体的方位角 —— 代表物体朝向,对于画框很关键
- $ c \in C =$ {Cars, Pedestrians, Cyclists} on KITTI
- 3D BBox的大小用3D templates $t$ 表示,文章称从训练数据学习
- 3D Object Proposals 的打分函数
- \[E(x,y) = \textbf{w}_{c,sem}^{T} \phi_{c,sem}(\textbf{x}, \textbf{y}) + \textbf{w}_{c,inst}^{T} \phi_{c,inst}(\textbf{x}, \textbf{y}) + \\ \textbf{w}_{c,cont}^{T} \phi_{c,cont}(\textbf{x}, \textbf{y}) + \textbf{w}_{c,loc}^{T} \phi_{c,loc}(\textbf{x}, \textbf{y}) + \\ \textbf{w}_{c,shape}^{T} \phi_{c,shape}(\textbf{x}, \textbf{y})\]
- 下面会分析其中的每一项
- Semantic Segmentation
- 分割类别:car, pedestrian, cyclist and road
- 考虑了两种类型的特征
- 第一种类型:按像素粒度算,类别为 $c$ 的物体出现在2D BBox的百分比
-
\[\phi_{c,seg}(\textbf{x}, \textbf{y}) = \frac{\sum_{i \in \Omega(\textbf{y})}S_c(i)}{|\Omega(\textbf{y})|}\]
- $\Omega(\textbf{y})$ 是3D BBox $\textbf{y}$在像平面投影的像素集合
- $S_c$ 物体类别 $c$ 的 segmentation mask
- 第二种类型:按像素粒度算,除类别为 $c$ 的物体外其他像素出现在2D BBox的百分比
-
\[\phi_{c,non-seg,c'}(\textbf{x}, \textbf{y}) = \frac{\sum_{i \in \Omega(\textbf{y})}S_{c'}(i)}{|\Omega(\textbf{y})|}\]
- 包含了道路、其他所有类别的特征
- 整体优化,使这一项尽可能小
- 具体地
- [41, 52] jointly learn the convolutional fea- tures as well as the pairwise Gaussian MRF potentials to smooth the output labeling.
- SegNet [3] performs semantic labelling
- use the pre-trained model on PASCAL VOC + COCO from [52] for $Car$ segmentation
- pre-trained SegNet model from [3] for $Pedestrian$ and $Cyclist$ segmentation
- KITTI 数据集语义分割的标注很少,所以没在上面finetune
- road benchmark of KITTI to finetune the network of [41] for road
- 多次提到积分图 —— integral images,没明白是什么??
- Shape
- 计算 Semantic Segmentation 后物体的轮廓(instead of the original image)
- 创建了 two grids,一个grid大小为 1 x 1,另一个大小为 $K \times K$,得到 $(1 + K \times K)$ 的特征向量
- tries to place a bounding box tightly around the object
- Instance Segmentation
- exploit the approach of [51, 50], which uses a CNN to create both instance-level pixel labeling as well as ordering in depth
- re-trained their model so that no overlap (not even in terms of sequences) exist between our training and valida- tion.
- Note that this approach is only available for Cars
- Context
- 编码物体及上下文,e.g.: cars are on the road, and thus we can see road below them
- use a rectangle below the 2D projection of the 3D bounding box as the contextual region.
- set its height to 1/3 of the height of the box, and use the same width, as in [33]
- Location
- 从两个角度编码位置信息:birds’ eye view, image plane
- learn the prior using kernel density estimation (KDE) with a fixed standard deviation of 4m for the 3D prior and 2 pixels for the image domain
- The 3D prior is learned using the 3D ground-truth bounding boxes available in KITTI
- 3D Proposal Learning and Inference
- 使用 exhaustive search as inference 创建 candidate proposals
- 使用 structured SVM 学习模型权重,我理解的是学习 $E(x,y)$ 右侧各子模块的权重
- 此模块损失函数:3D IoU
- CNN Scoring of Top Proposals
- 有了 3D Proposals,要对 proposals 处理:抛弃或者预测category、BBox、orientation
- 使用论文 Chen et al. 的方法,结构图如下
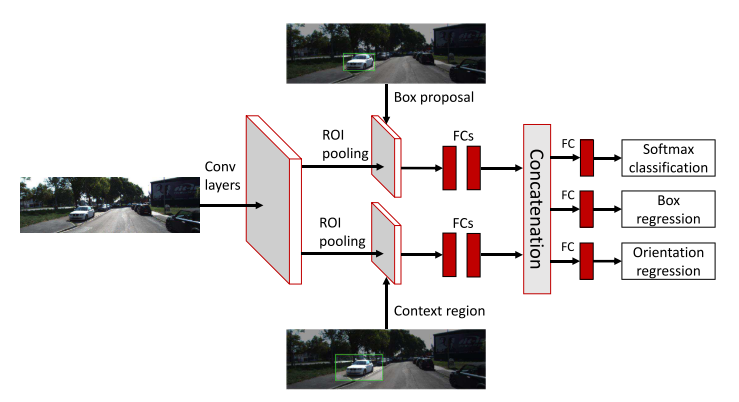
- 基于 Fast R-CNN 搭建,计算整幅图片特征后分成2个分支
- one branch encodes features from the proposal regions
- another is specific to context regions by enlarging the proposal regions by a factor of 1.5(参考之前的工作)
- 每个分支有 RoI pooling + 2 FC layers
- RoIs are obtained by projecting the proposals or context regions onto the conv5 feature maps.
- 此模块最终的输出组合了两个分支的特征
- 多任务损失函数 —— category labels, bounding box offsets, and object orientation
- category loss as cross entropy
- orientation loss as a smooth ℓ1
- bounding box offset loss as a smooth ℓ1
- 一些实现细节
- Sampling Strategy(不理解为什么起这样的名字)
- 在 proposal gener- ation model,把物体放到了地平面
- KITTI中,相机位置已知,对于所有图像地平面是固定的??
- 认为像平面正交于地平面,相机距离地平面 $h_{cam} = 1.65m$
- 但是对于地面有斜坡的情况并不成立,所以调整为 $h_{cam} = 1.65m + \delta $,$\delta \in {0,\pm\sigma}$ for $Car$,$\delta \in {0,\pm\sigma,\pm2\sigma}$ for $Predestrian$ and $Cyclist$。$\sigma$ 是高斯分布标准差的极大似然估计
- Network Setup
- 用 VGG-16 初始化模型,对应哪部分呢??
- CNN Scoring of Top Proposals 的两个分支用 VGG-16 的全连接层初始化
- KITTI图片中的小物体,扩大输入图像3.5倍 following [10]
- Sampling Strategy(不理解为什么起这样的名字)
实验
- 数据集:KITTI object detection benchmark
- Car, Pedestrian, and Cyclist, with 7,481 training and 7,518 test images
- 根据 occlusion and truncation levels,每个类别评价时有3种模式:easy, moderate, hard
- 评估指标:
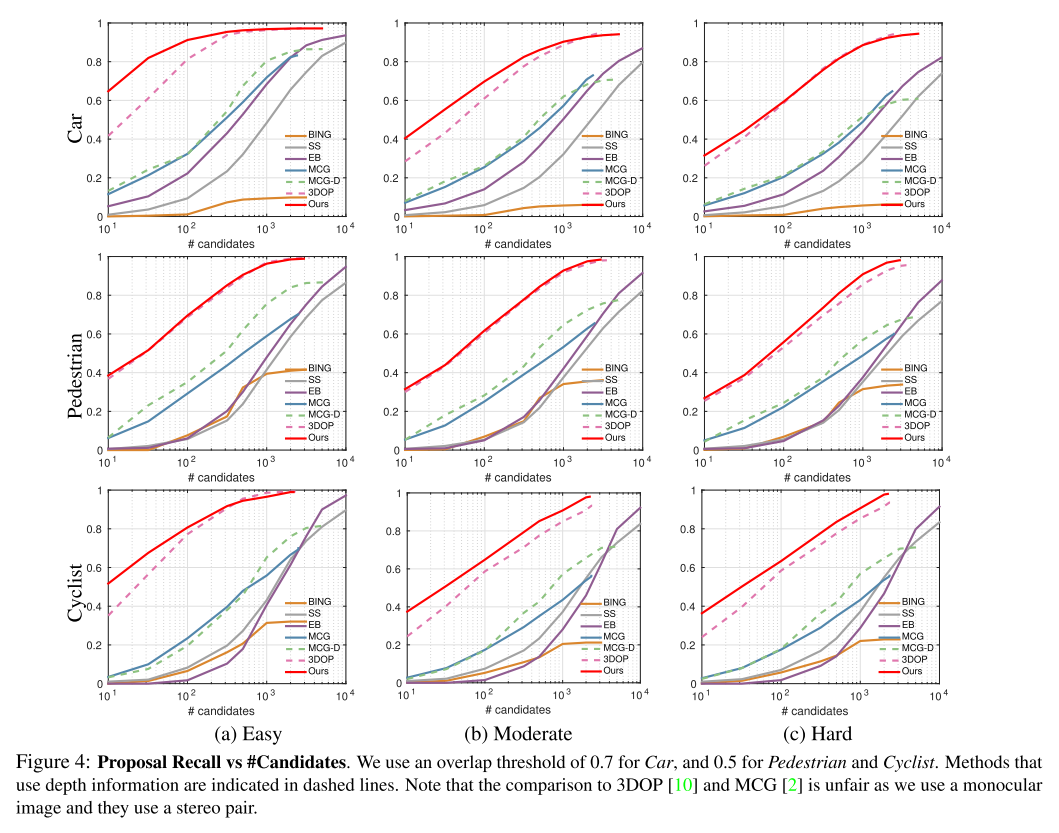
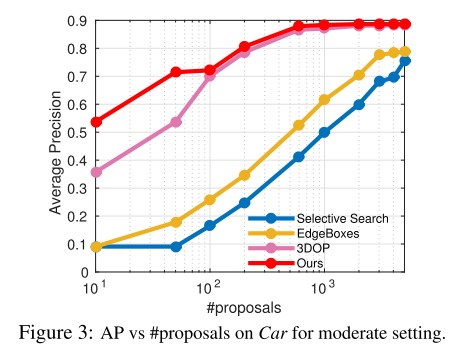
- 对于 proposals generation,使用 recall following [22, 45]
- ??对比 recall 是否有意义,因为最后的目标是 3D object detection,应该看的是最后检测到物体的recall和precision,而不是proposal的;过多的 proposals 会降低模型推理速度
- (用这个评价有些少见,对于这个论文想要强调的点,可能是有利的)
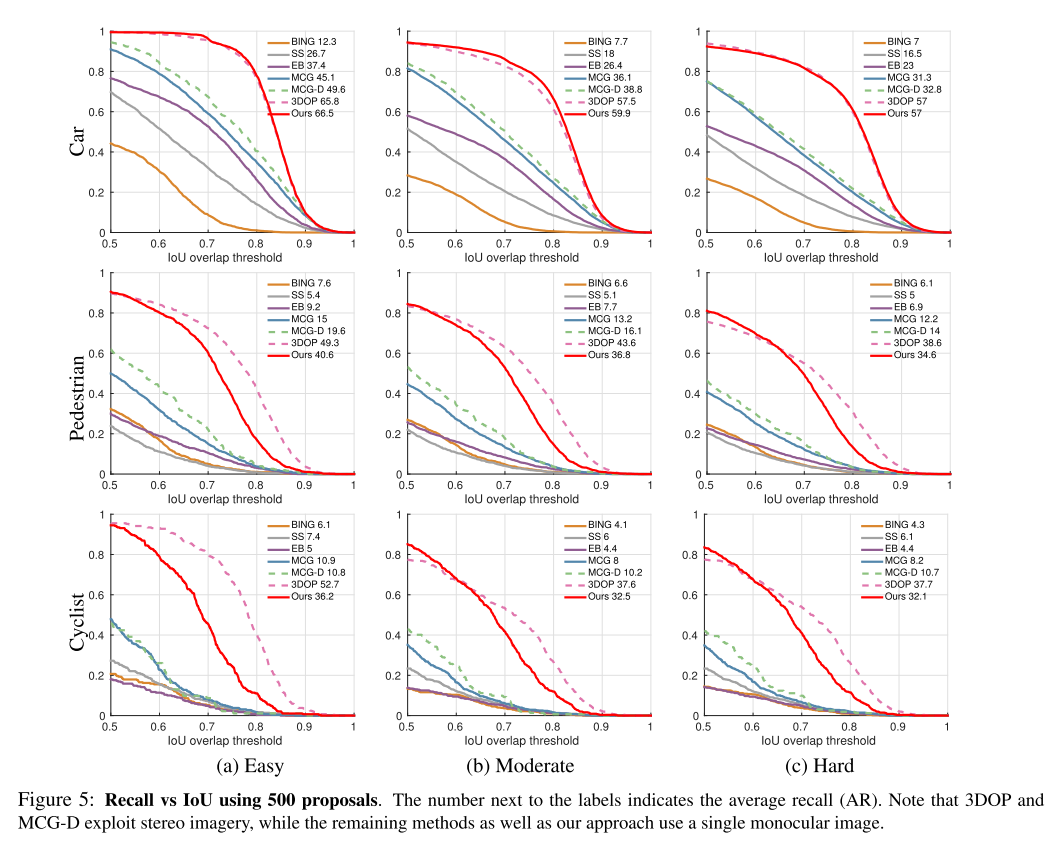
- IoU threshold to 70% for Car and 50% for Pedestrian and Cyclist following the KITTI setup
- 对于 3D object detection,有两个子任务
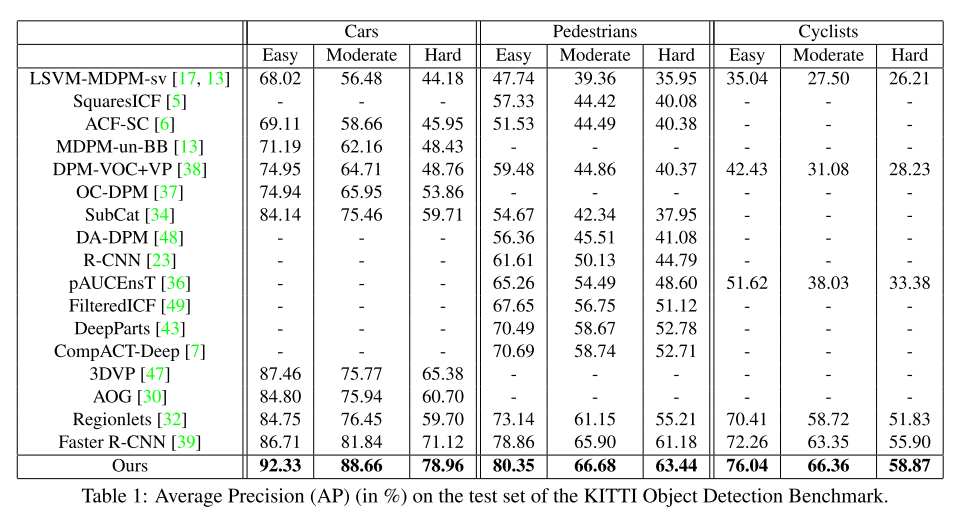
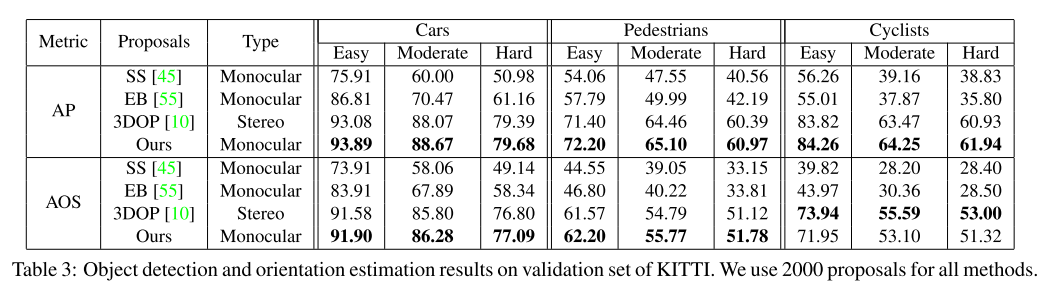
- object detection,使用 average precision (AP)
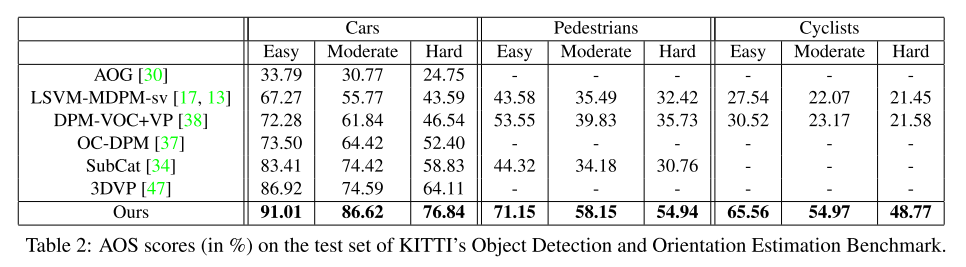
- object detection and orientation estimation,使用 Average Orientation Similarity (AOS)
- 对于 proposals generation,使用 recall following [22, 45]
- Baselines
- 3DOP [10], MCG-D [21], MCG [2], Selective Search (SS) [45], BING [11], and Edge Boxes (EB) [55]
- 3DOP and MCG-D exploit depth information, while the remaining methods as well as our approach only use a single RGB image
- all of the above approaches, but 3DOP, are class independent (trained to detect any foreground object)
- while we use class-specific weights as well as semantic segmentation in our features
-
Proposals Generation 结果
-
KITTI Object Detection Benchmark
-
KITTI Object Detection and Orientation Estimation Benchmark
-
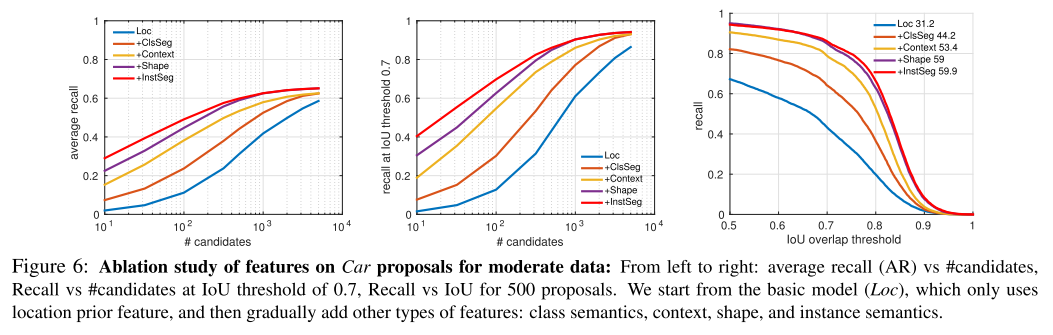
Ablation Study
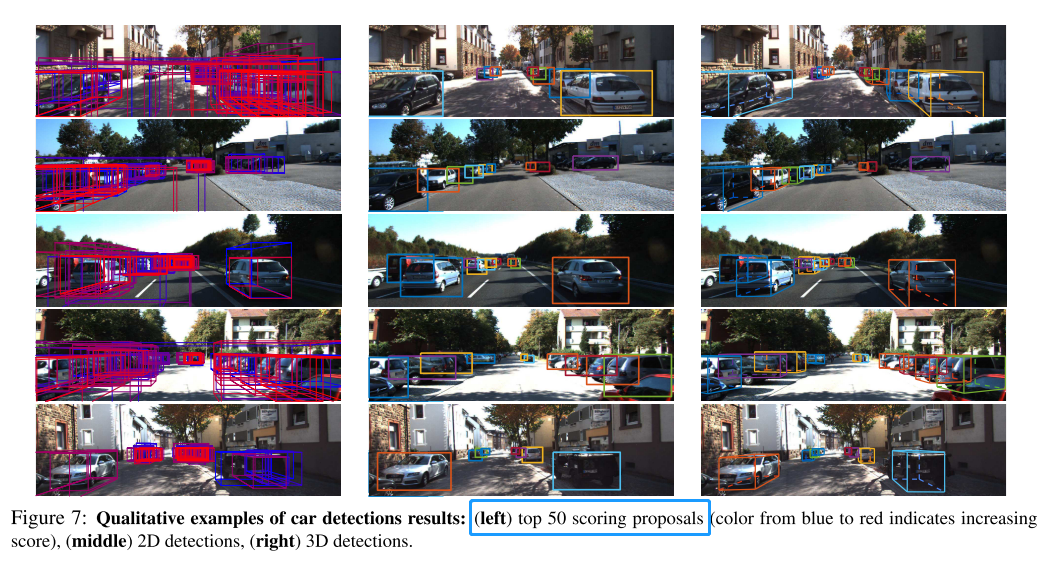
- Showcased Examples
思考和讨论
- 这篇文章就是会写,把别人的工作组合在一起,但强调自己的贡献
- 从头到尾讲的是2D图像的操作,3D框、朝向是怎么得到??难道是 CNN Scoring of Top Proposals 的输出??