这篇博客分享的是 AAAI 2019 的一篇文章。该文研究利用单目相机采集的图片,对汽车进行3D定位和检测;主要的贡献是在3D定位和检测过程中
引入了 geometric knowledge,并在KITTI数据集进行了测试和消融实验,证明了 geometric knowledge 有助于提升3D定位和检测效果;文章称MonoGRNet在Geforce GTX Titan X处理速度为 0.06 sec/frame。
论文标题:MonoGRNet: A Geometric Reasoning Network for Monocular 3D Object Localization
论文作者:Zengyi Qin, Jinglu Wang, Yan Lu (来自清华大学、MIT、Microsoft)
简介
2D物体检测在一些场景发挥了作用,它是物体跟踪、行人重识别等的基础,但是在机器人、自动驾驶、AR/VR领域,2D物体检测就不够用了,因为缺乏
- 物体真实尺寸信息
- 物体在3D空间的位置信息
本文解决的问题是:从单目图像,定位物体在整个环境中的 3D bounding box(文中术语是 ABBox-3D,amodal 3D bounding box)。2D 物体检测是在像平面上分析,扩展到3D会引来歧义。
许多基于单目的3D检测SOTA方法,通常会估计 pixel-level depth(不太了解,这方面论文读的比较少),然后估计物体的3D BBox。本文作者认为估计像素深度的方式,对于物体检测、定位不友好,因为这种方式目标是最小化所有像素深度的误差之和的平均值,达到整幅图片最优;然而一幅图像中,很可能物体只占一小部分,更多的是背景,优化过程容易忽略有物体的部分,从而导致3D物体检测和定位效果不佳。
本文提出的 MonoGRNet,不去估计 pixel-level depth,而是估计 instance-level depth,二者的区别很明显。直观想法是用神经网络的 deep feature maps 估计coarse instance depth,再用 shallow feature maps 对前面的depth调整。
有了物体的 depth,还需估计 horizontal 和 vertical 位置。本文首先预测物体3D中心在像平面的投影,再结合depth和相机成像模型,得到物体最终的3D位置。这个过程体现了 Geometric Reasoning。
相关工作
- 2D Object Detection
- Region Proposal based Method
- Girshick, R. 2015. Fast r-cnn. In Proceedings of the IEEE international conference on computer vision, 1440–1448.
- Ren, S.; He, K.; Girshick, R.; and Sun, J. 2017. Faster r-cnn: towards real-time object detection with region proposal networks. IEEE Transactions on Pattern Analysis & Machine Intelligence.
- Single Stage Detection
- Redmon, J.; Divvala, S.; Girshick, R.; and Farhadi, A. 2016. You only look once: Unified, real- time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, 779–788.
- Redmon, J., and Farhadi, A. 2017. Yolo9000: Better, faster, stronger. In Computer Vi- sion and Pattern Recognition (CVPR), 6517–6525. IEEE.
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; and Berg, A. C. 2016. Ssd: Single shot multibox detector. In European conference on computer vision (ECCV), 21–37. Springer.
- Fu, C.-Y.; Liu, W.; Ranga, A.; Tyagi, A.; and Berg, A. C. 2017. Dssd: Deconvolutional single shot detector. arXiv preprint arXiv:1701.06659.
- Multi-net
- Teichmann, M.; Weber, M.; Zoell- ner, M.; Cipolla, R.; and Urtasun, R. 2016. Multinet: Real-time joint semantic reasoning for autonomous driving. arXiv preprint arXiv:1612.07695.(组合YOLO、RoIAlign of Mask-RCNN)
- Region Proposal based Method
- 3D Object Detection
- Single-view RGB(其实就是单目图像)
- Chen, X.; Kundu, K.; Zhang, Z.; Ma, H.; Fidler, S.; and Urtasun, R. 2016. Monocular 3d object detection for autonomous driving. In Conference on Computer Vision and Pattern Recognition (CVPR), 2147–2156.
- Xu, B., and Chen, Z. 2018. Multi-level fusion based 3d object detection from monocular images. In Computer Vision and Pattern Recognition (CVPR), 2345–2353.
- Chabot, F.; Chaouch, M.; Rabarisoa, J.; Teuli`ere, C.; and Chateau, T. 2017. Deep manta: A coarse-to-fine many-task network for joint 2d and 3d vehicle analy- sis from monocular image. In Computer Vision and Pattern Recognit.(CVPR), 2040–2049.
- Kehl, W.; Manhardt, F.; Tombari, F.; Ilic, S.; and Navab, N. 2017. Ssd-6d: Making rgb-based 3d detection and 6d pose estimation great again. In Proceedings of the International Conference on Computer Vision (ICCV 2017), Venice, Italy, 22–29.
- multi-view RGB
- Chen, X.; Ma, H.;Wan, J.; Li, B.; and Xia, T. 2017. Multi-view 3d object detection network for au- tonomous driving. In IEEE CVPR, volume 1, 3.
- Chen, X.; Kundu, K.; Zhu, Y.; Berne- shawi, A. G.; Ma, H.; Fidler, S.; and Urtasun, R. 2015. 3d object proposals for accurate object class detection. In Advances in Neural Information Processing Systems, 424–432.
- Wang, J.; Fang, T.; Su, Q.; Zhu, S.; Liu, J.; Cai, S.; Tai, C.-L.; and Quan, L. Image-based building regularization using structural linear features. IEEE Transactions on Visualization Computer Graphics.
- RGB-D
- Qi, C. R.; Liu, W.; Wu, C.; Su, H.; and Guibas, L. J. 2017. Frustum pointnets for 3d object de- tection from rgb-d data. arXiv preprint arXiv:1
- Song, S., and Xiao, J. 2016. Deep sliding shapes for amodal 3d object detection in rgb-d im- ages. In The IEEE Conference on Computer Vision and Pattern Recognition (CVPR).
- Liu, J.; Wang, J.; Fang, T.; Tai, C.-L.; and Quan, L. 2015. Higher-order crf structural segmentation of 3d reconstructed surfaces. In IEEE International Conference on Computer Vision.
- Zhang, H.; Wang, J.; Fang, T.; and Quan, L. 2014. Joint segmentation of images and scanned point cloud in large-scale street scenes with low-annotation cost. IEEE Transactions on Image Processing 23(11):4763–4772.
- Single-view RGB(其实就是单目图像)
- Monocular Depth Estimation
- Eigen, D., and Fergus, R. 2015. Predicting depth, surface normals and semantic labels with a common multi-scale convolutional architecture. In Proceedings ofthe IEEE International Conference on Computer Vision, 2650–2658.
- Fu, H.; Gong, M.;Wang, C.; Batmanghelich, K.; and Tao, D. 2018. Deep ordinal regression network for monocular depth estimation. In Computer Vision and Pattern Recognition (CVPR).
主要方法
- 问题定义
- 输入:an RGB image
- 输出:\(B_{3d} = (B_{2d}, Z_c, \textbf{c}, \mathcal{O})\)
- 2D BBox $B_{2d}$
- 汽车3D空间的 depth $Z_c$(相机坐标系下)
- 物体3D center在像平面的投影点 $\textbf{c}$
- 用几何方法求出:3D center ($X_{c}, Y_{c}, Z_{c}$)
- 3D BBox
- 相对于3D center,有8个corner points $ \mathcal{O} = {{\textbf{O}_k}} $, $k = 1,…,8$
- MonoGRNet 整体结构
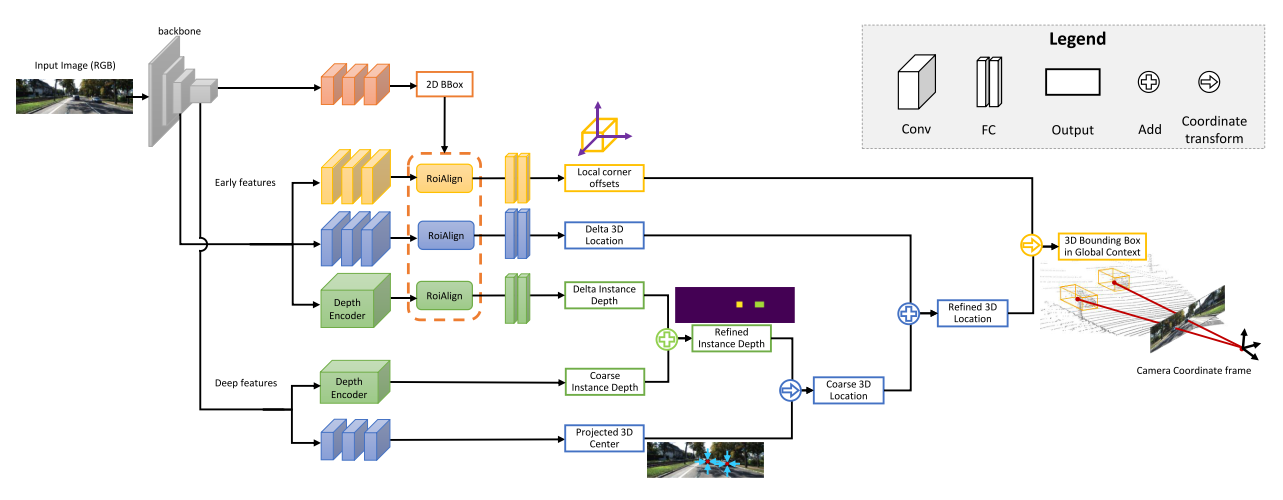
- 2D BBox Detection
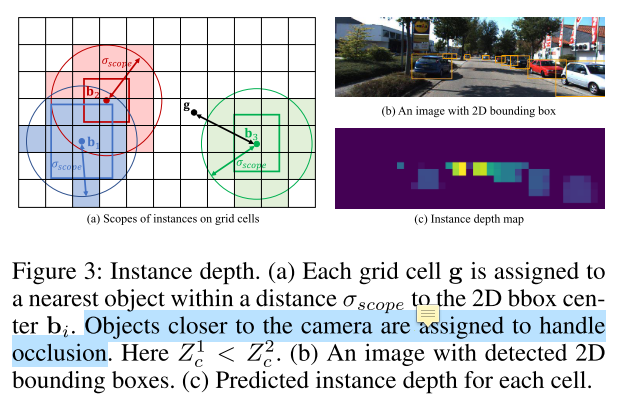
- Instance Depth Estimation
- 3D Location Estimation —— 体现了 Geometric Reasoning
- 3D BBox Regression
- 涉及到几个坐标系
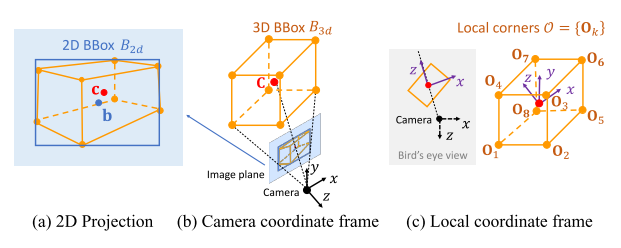
- 图(a)说明物体3D中心点,投影到像平面,不一定和2D BBox中心点重合
- 图(c) local coordinate frame,以物体3D中心为原点,相机原点和物体3D中心连线为z轴
- 2D BBox Detection
- 利用现成的 Multinet,组合了 YOLO、size-adaptive RoIAlign
- 一幅 $W \times H$ 的图片,划分成 $S_x \times S_y$ 的网格$\mathcal{G}$,每个网格表示成 $\textbf{g}$,产生一个预测 $(Pr_{obj}^{\textbf{g}}, B_{2d}^{\textbf{g}})$
- 主干网络输出的 feature map,大小也为 $S_x \times S_y$ $\rightarrow$ 特征图的一个像素对应元素图片的一个 $\textbf{g}$
- $ B_{2d} = (\delta_{xb}, \delta_{yb}, w, h) $
- $(\delta_{xb}, \delta_{yb})$ 是相对于 $\textbf{g}$ 的物体中心点坐标
- 物体宽和高 $(w, h)$
- Instance Depth Estimation
- 每个$\mathcal{G}$ 中的 $\textbf{g}$,预测一个物体的 3D depth $\leftarrow$ 距离限制 $\delta_{scope}$
- deep feature map 预测 coarse depth $Z_{cc}$,shallow feature map 调整 coarse depth $\delta_{Z_{c}}$,$ Z_{c} = Z_{cc} + \delta_{Z_{c}}$
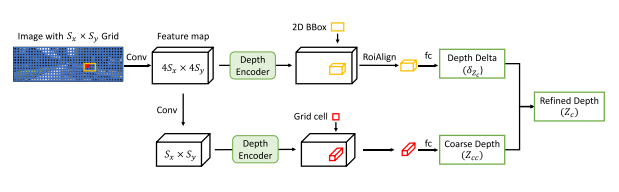
- 每个$\mathcal{G}$ 中的 $\textbf{g}$,预测一个物体的 3D depth $\leftarrow$ 距离限制 $\delta_{scope}$
- 3D Location Estimation
- 估计 $ \textbf{C} = (X_{c}, Y_{c}, Z_{c})$
- 相机成像模型

- $f_x$、$f_y$分别是 X、Y 轴上的焦距;$p_x$、$p_y$是图像的中心点坐标

- deep feature map 预测物体投影中心相对于 $\textbf{g}$ 的坐标 $\delta_{\textbf{c}} = (\delta_{x_{c}}, \delta_{y_{c}})$,所以物体投影中心在像平面的坐标为 $\delta_{\textbf{c}} + \textbf{g}$
- 因此,有了 $Z_c$ 和物体投影中心 $\textbf{c}$,就能得到 \(\textbf{C}_{s} = (X_{c}, Y_{c}, Z_{c})\)
- shallow feature map 得到 $\delta_{\textbf{C}}$,用来调整 $\textbf{C}_{s}$
- 最终位置:\(\textbf{C} = \textbf{C}_{s} + \delta_{\textbf{C}}\)
- 3D BBox Regression
- 估计8个顶点 $ \mathcal{O} = {{\textbf{O}_k}} $, $k = 1,…,8$
- 直接估计8个顶点在相机坐标系的位置,具有歧义性 —— 不同的物体,由于相机视角,可能产生相同的投影
- 参考前人的工作,在 local coordinate frame 下估计顶点坐标
- 计算出来的顶点是相对于物体3D中心的,还需要转换到相机坐标系
- \[\textbf{O}_{k}^{cam} = \textbf{R} \textbf{O}_{k} + \textbf{C}\]
- $\textbf{R}$ 可求,$\textbf{C}$ 就是上面计算出来的中心点
- Loss Functions
- 2D Detection Loss
- Instance Depth Loss
- 3D Localization Loss
- Local Corner Loss
- \[\mathcal{L}_{corners} = \sum_{\textbf{g}} \sum_{k} \mathbb{1}_{\textbf{g}}^{obj} \cdot d(\textbf{O}_k, \tilde{\textbf{O}}_k)\]
- Joint 3D Loss
- \[\mathcal{L}_{joint} = \sum_{\textbf{g}} \sum_{k} \mathbb{1}_{\textbf{g}}^{obj} \cdot d(\textbf{O}_k^{cam}, \tilde{\textbf{O}}_k^{cam})\]
- 2D Detection Loss
- 一些实现细节
- VGG-16 backbone,不带全连接层,抽取特征
- KittiBox (Teichmann et al. 2016) for 2D detection
- DORN (Fu et al. 2018) for depth encoder
- 平衡因子,$w = \alpha = \beta = 10$
- 7.7M paprameters for all 2D and 3D modules
实验
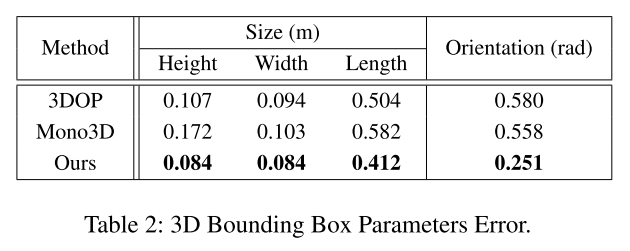
- 3D Location Estimation
- 评价指标:mean errors $\rightarrow$ 预测的物体位置和距离最近的 ground truth
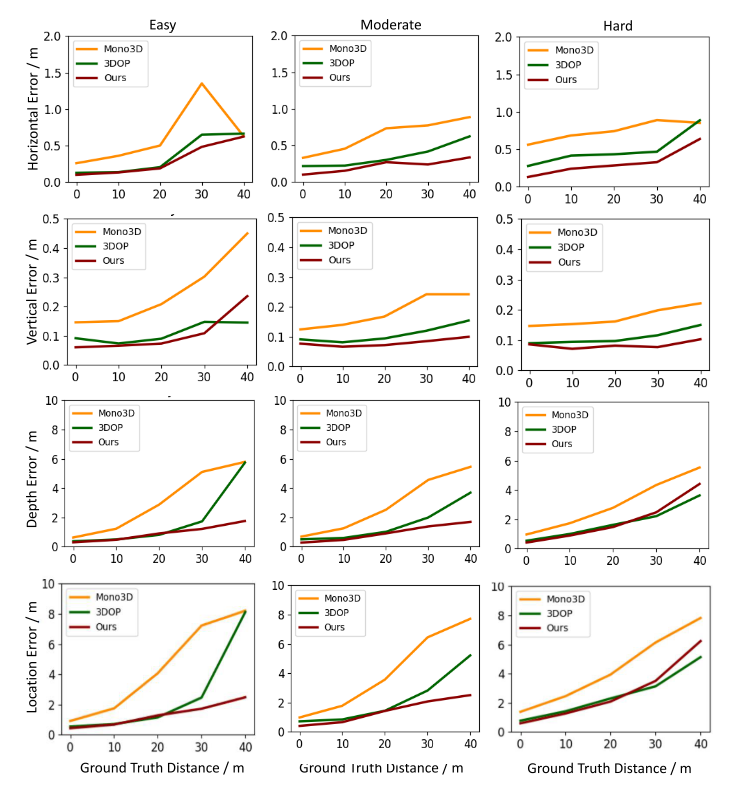
- 三个维度,depth error 占主导
- 评价指标:mean errors $\rightarrow$ 预测的物体位置和距离最近的 ground truth
- 3D Detection
- 评价指标:3D Average Precision ($AP_{3D}$) at different Intersection of Union (IoU) thresholds
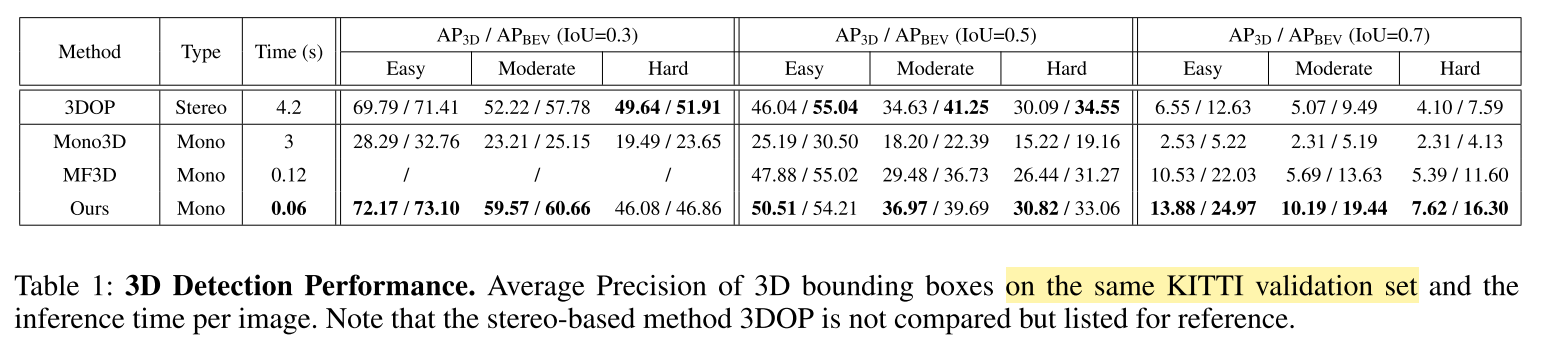
- 评价指标:3D Average Precision ($AP_{3D}$) at different Intersection of Union (IoU) thresholds
- Local 3D Bounding Box Regression
- 估计box宽、高、长
- 估计box朝向 orientation,用相机坐标系下的方位角计算(??不太理解)
- 一些可视化案例
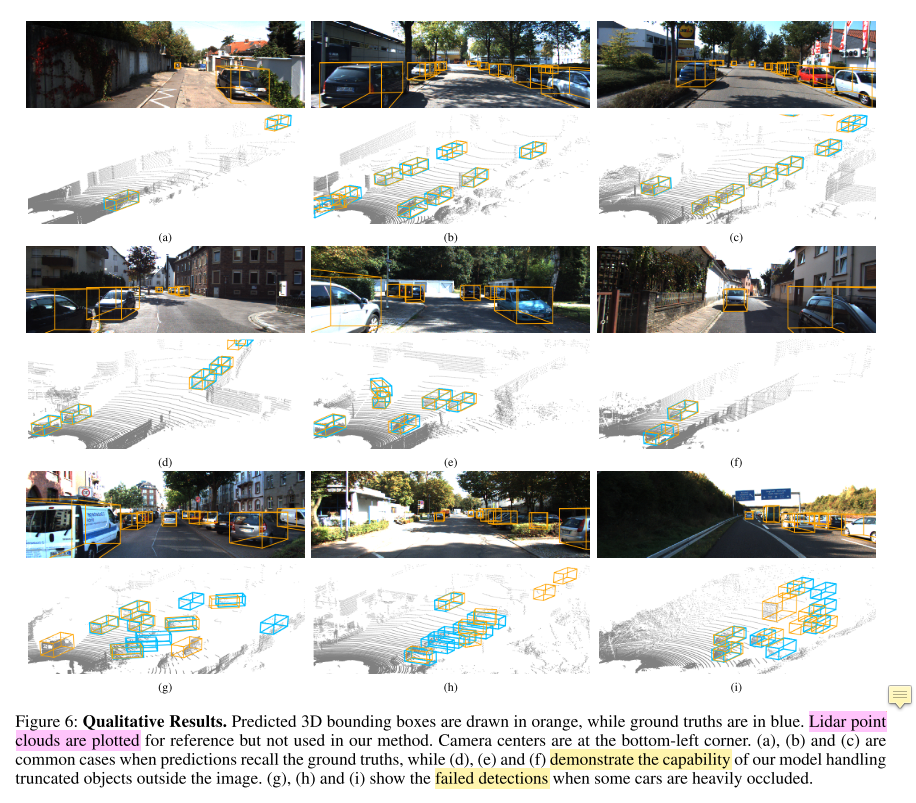
- (a)(b)(c) : common areas
- (d)(e)(f) : truncated objects
- (g)(h)(i) : failed detections
- Ablation Study
- 如果直接把 2D BBox 中心点 $\textbf{b}$ 当作物体3D中心在像平面的投影点 $\textbf{c}$,进行定位
- horizontal location error rises from 0.27m to 0.35m
- vertical error increases from 0.09m to 0.69m
- 当物体被截断时,$\textbf{c}$ 可能落在像平面外,$\textbf{b}$ 总是在像平面
- 如果直接估计 3D BBox 在相机坐标系下的8个顶点
- average orientation error increases from 0.251 to 0.442 radians
- height, width and length errors of the 3D bounding box almost remain the same
- 如果直接把 2D BBox 中心点 $\textbf{b}$ 当作物体3D中心在像平面的投影点 $\textbf{c}$,进行定位
总结与思考
- 提出了单目图像的3D物体检测和定位模型
MonoGRNet - 直接进行 instance-level depth estimation,而不是 pixel-level depth estimation
- 把像平面2D BBox中心点和物体3D中心在像平面的投影点区分开来,利用相机模型进行
geometric reasoning - 其实本文3D定位的核心:先估计物体在相机坐标系的深度,再利用相机成像模型,把2D平面的点转换到3D空间