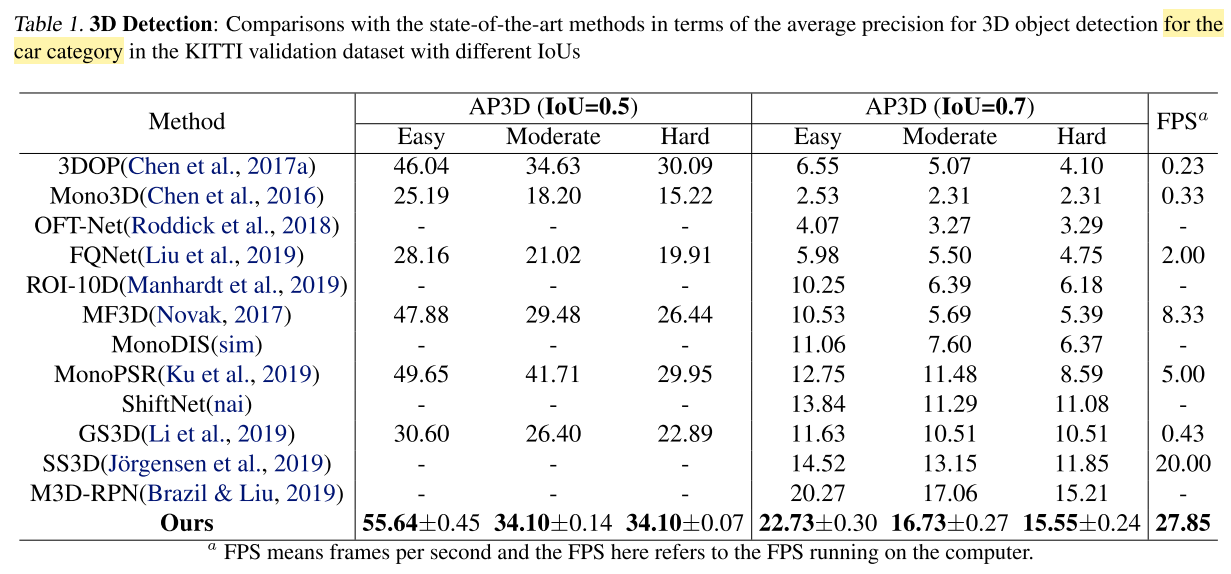
这篇博客分享的是 ICML 2020 的一篇文章,这篇文章研究的内容是自动驾驶——ADAS中,汽车的3D检测和定位,主要的贡献是在神经网络中引入了邻近汽车的空间几何关系,相当于增加了限定条件,在KITTI数据集上的实验表明这种方法提高了3D检测和定位的准确率;文章称处理速度可以达到 27.85 FPS。
论文标题:MoNet3D: Towards Accurate Monocular 3D Object Localization in Real Time
论文作者:Xichuan Zhou, Yicong Peng, Chunqiao Long, Fengbo Ren, Cong Shi (来自重庆大学、亚利桑那州立大学)
简介
利用单目图像对三维空间中物体检测和定位是一项有挑战性的任务,解决这个任务对于 Advanced Driving Assistance System(ADAS) 很关键。近年来,研究人员和工程师开发了一些基于深度学习(特别是CNN)的视觉系统,以求对自动驾驶场景中物体进行准确的检测和定位。
单目图像2D物体检测在效率和准确率方面取得了比较好的进展,但是单目3D物体检测还有很多困难。与雷达、双目系统相比,单目视觉系统的准确率较差(比雷达系统低63.02%),还远不能应用到ADAS,但是它的优势是硬件成本低。
单目视觉系统面临的挑战:
- 不能得到场景的深度信息,导致3D目标检测缺乏一个维度
- 物体遮挡、非弹性形变,镜头成像失真(都会有这样的问题,不仅是单目)
研究者试图引入一些先验知识、增加已知量和限制条件,来优化基于深度学习的视觉系统。例如:
- 3D-Deepbox 使用先验知识,即预测的3D边界框应紧密拟合2D边界框
- Mono3D_PLiDAR 假设3D物体的2D投影与2D物体的边界框全局一致 —— global geometric consistency
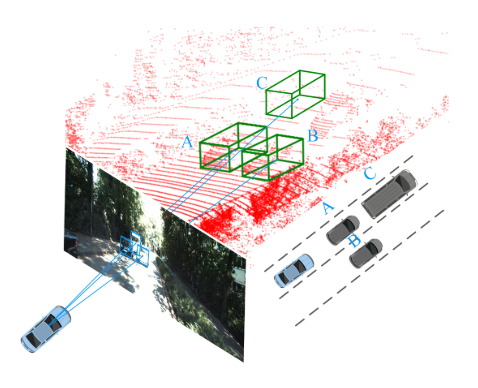
这些研究表明,2D和3D物体的边界框的几何关系是有用的信息,本文认为 global geometric consistency 这个假设太强了,提出了 local geometric consistency:
- 如果两个物体在坐标系中具有相似的深度,并且2D图像离得较近,那么3D空间中离得也应该较近
- 作为一个正则化项,加入神经网络的损失函数(据说提高准确率和训练速度?)
相关工作(CVPR、NeurIPS、TPAMI、AAAI)
3D Object Detection from LiDAR
- 基于雷达的3D物体检测(雷达设备比摄像头贵很多)
- Li, B., Zhang, T., and Xia, T. Vehicle detection from 3d lidar using fully convolutional network. arXiv preprint arXiv:1608.07916, 2016
- 基于点云的3D物体检测
- Qi, C. R., Su, H., Mo, K., and Guibas, L. J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 652–660, 2017a
- Qi, C. R., Yi, L., Su, H., and Guibas, L. J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In Advances in neural information processing systems, pp. 5099–5108, 2017b
- Qi, C. R., Liu, W., Wu, C., Su, H., and Guibas, L. J. Frustum pointnets for 3d object detection from rgb-d data. In Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, pp. 918–927, 2018
- Zhou, Y. and Tuzel, O. Voxelnet: End-to-end learning for point cloud based 3d object detection. In Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, pp. 4490–4499, 2018
- Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. Multi-view 3d object detection network for autonomous driving. In Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, pp. 1907–1915, 2017b
3D Object Detection for a Single Monocular Image
-
L3级自动驾驶,尝试用普通摄像头和深度学习方法建立视觉系统
- Chen, X., Kundu, K., Zhang, Z., Ma, H., Fidler, S., and Urtasun, R. Monocular 3d object detection for autonomous driving. In Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, pp. 2147–2156, 2016
- Fang, J., Zhou, L., and Liu, G. 3d bounding box estimation for autonomous vehicles by cascaded geometric constraints and depurated 2d detections using 3d results. arXiv preprint arXiv:1909.01867, 2019
- Zhou, Y. and Tuzel, O. Voxelnet: End-to-end learning for point cloud based 3d object detection. In Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, pp. 4490–4499, 2018
- Crivellaro, A., Rad, M., Verdie, Y., Yi, K. M., Fua, P., and Lepetit, V. Robust 3d object tracking from monocular images using stable parts. IEEE transactions on pattern analysis and machine intelligence, 40(6):1465–1479, 2017
- Liu, L., Lu, J., Xu, C., Tian, Q., and Zhou, J. Deep fitting degree scoring network for monocular 3d object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1057–1066, 2019
- Li, B., Ouyang, W., Sheng, L., Zeng, X., and Wang, X. Gs3d: An efficient 3d object detection framework for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1019–1028, 2019
- Qin, Z., Wang, J., and Lu, Y. Monogrnet: A geometric reasoning network for monocular 3d object localization. In Proceedings ofthe AAAI Conference on Artificial Intelligence, volume 33, pp. 8851–8858, 2019
主要方法
- 问题定义
- 输入:an RGB image
- 输出:汽车3D bounding box ($center \quad point$ 和8个 $corner \quad points$),3D localization ($x,y,z$)
-
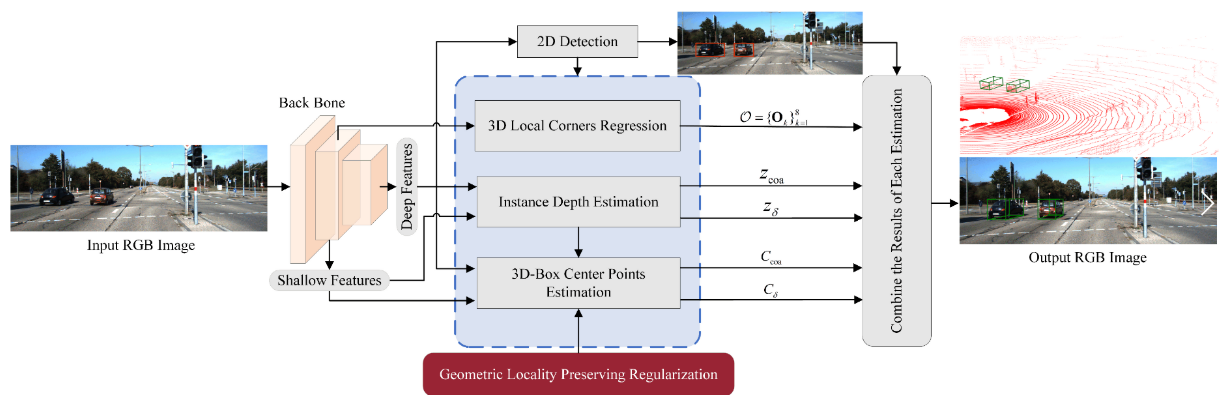
整体模型结构
-
图片特征抽取,使用不带全连接层的 VGG-16
- 图片特征处理部分,有4个模块
- 2D Detection,就是通常的目标检测
- Car Depth Estimation,个人理解指相机坐标系下物体的z值
- 3D Box Center Point Estimation —— 本文认为是主要的挑战
- 中心点 horizontal offset,对于判断汽车在哪个车道很重要,引入了之前提到的 local geometric relation
- 3D Box Corner Regression,利用2D Detection的结果和图片特征,回归8个3D坐标
- Geometric-Locality-Preserving Regularization
- 假设训练集有 M 个物体,S 是大小为 MxM 的相似度矩阵,其中 $s_{ij}$ 表示物体 $i$ 和 $j$ 的局部几何相似度,计算方法如下

- $u_{i}^{(2d)}$ 代表物体 $i$ 在像平面的 horizontal offset
- $z_{i}^{(3d)}$ 代表物体 $i$ 的3D ground truth depth
- 假设:当 $i$ 和 $j$ 具有相似的 depth,并且像平面 2D bbox 离得近时,$s_{ij}$的值较大;当 $i$ 和 $j$ 具有的 depth 差别较大或者,2D bbox 离得远时,$s_{ij}$的值较小
- 用神经网络的一个 $fully \quad connected \quad layer$ 实现这样的假设
- $y_{i} = \textbf{W} x_{i} + \textbf{b}$,$y_{i}$ 实际是个二维向量 $(u_{i}^{(3d)}, z_{i}^{(3d)})$
- $x_{i}$ 是全连接层的输入,$\textbf{W}$ 是对应的权重,$\textbf{b}$ 是偏置项
- 如果两个物体在真实3D空间离得近,MoNet3D 试图优化 $\textbf{W}$,让$s_{ij}$变大(??不太理解原文说的,而且$s_{ij}$也没参与全连接层的计算)
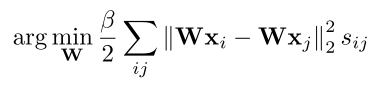
- 定义一个正则化项 $R(\textbf{W})$,使其最小化
- 对 $R(\textbf{W})$ 向量化 —— 高效计算
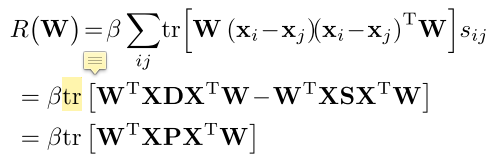
- X = $[x_{1},x_{2},…,x_{M}]$
- D 是对角矩阵,$d_{ii} = \sum_{j} s_{ij}$
- P = D - S
- 假设训练集有 M 个物体,S 是大小为 MxM 的相似度矩阵,其中 $s_{ij}$ 表示物体 $i$ 和 $j$ 的局部几何相似度,计算方法如下
- 损失函数
- 2D Detection,把原始图像划分成 32x32 的grids,用 YOLO 检测,每个
grid产生两个bbox(??不懂为什么么限定这个),每个bbox表示为 $b_{2d}^g = (u^{(2d)}, v^{(2d)}, d, h)$ 以及 $Pr_{obj}$,$b_{2d}^g$ 的四个量分别代表中心点横纵坐标、高、宽,然后用 NMS + ROIAlign,这部分的损失函数表示为- \[L_{2d} = L_{conf} + \alpha L_{b2d}\]
- \[L_{conf} = \mathcal{E}_{g} [\mathcal{S}(\hat{Pr}_{obj}^{g}), Pr_{obj}^{g}]\]
- \[L_{b2d} = \sum_{g}{ }_{g}^{obj} \cdot \mathcal{L}_{1}(\hat{b}_{2d}^{g}, b_{2d}^{g})\]
- $ \mathcal{S}(\cdot)$ 是 softmax fuction
- $ \mathcal{E}(\cdot)$ 是 cross entropy fuction
- $\mathcal{L}_{1}$ 是 L1 distance
- $\alpha$ 是平衡因子
- Car Depth Estimation,$z_{g}$ 代表某个
grid中的 ground truth 物体深度,估计物体深度时,先用 deep features 预测一个粗略的——coarse深度\(\hat{z}_{coa}^{g}\),再用 shallow features 产生的预测 \(z_{\delta}^{g}\) 作调整,这部分的损失函数表示为- \[L_{z} = \gamma L_{zcoa} + L_{\delta z}\]
- \[L_{zcoa} = \sum_{g}{ }_{g}^{obj} \cdot \mathcal{L}_{1}(\hat{z}_{coa}^{g}, z^{g})\]
- \[L_{\delta z} = \sum_{g}{ }_{g}^{obj} \cdot \mathcal{L}_{1}(\hat{z}_{coa}^{g} + z_{\delta}^{g}, z^{g})\]
- $\delta$ 是平衡因子
- 3D Box Estimation,预测3D中心点 $C_{3d} = (u^{(3d)}, v^{(3d)}, z^{(3d)})$ 和 立方体八个顶点 \(\mathcal{O} = {\{\textbf{O}_k\}}_{k=1}^8\)(8个顶点用 deep features 回归估计)。2D Box 的中心点 $C_{2d} = (u^{(2d)}, v^{(2d)})$,根据成像模型,像素坐标和相机坐标的关系为:
- $f$ 是焦距,$\theta$、$\varphi$ 是成像平面中心点横、纵坐标
- 3D中心点损失函数为:

- 3D Box 8个顶点损失函数为:

- 2D Detection,把原始图像划分成 32x32 的grids,用 YOLO 检测,每个
实验
- 实验设置
- 数据集使用
KITTI,train/test split:3712/3769 images - 3 types of objects:
- easy —— the bounding box height is greater than 40 pixels, all the objects are visible and truncated by no more than 15%
- moderate —— the bounding box height is greater than 25 pixels, most objects are visible and truncated by no more than 30%
- hard —— the bounding box height is greater than 25 pixels, and most of the objects are invisible and not truncated by more than 50%
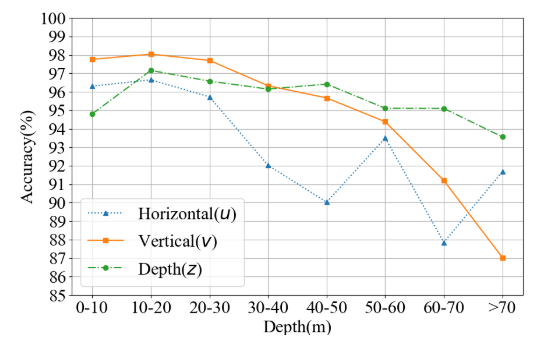
- 3D 物体定位方面,计算 $(u^{(3d)}, v^{(3d)}, z^{(3d)})$ 的相对准确率
- 3D 物体检测方面,考虑了两个 IOU threshold
- average 3D accuracy rate
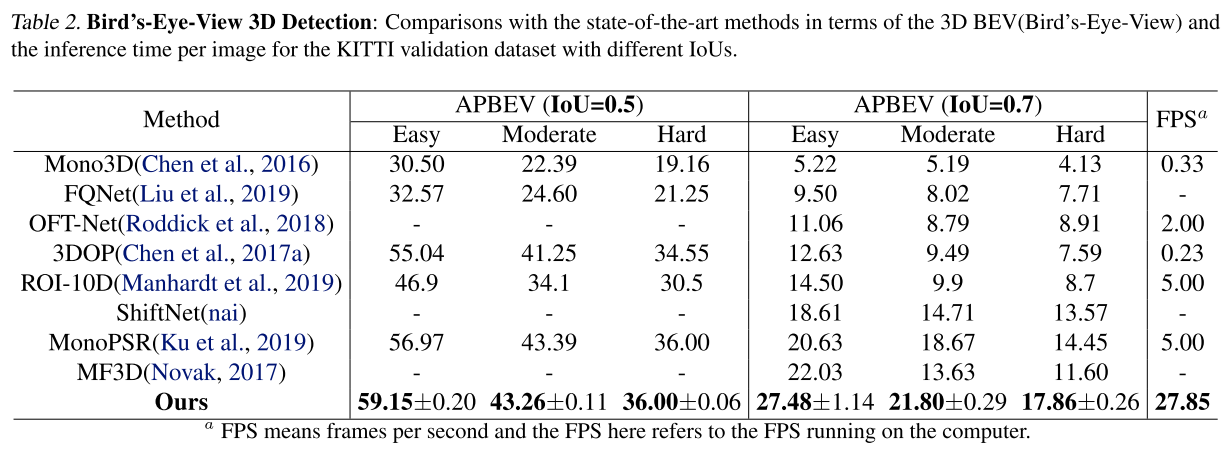
- bird’s-eye view average accuracy
- 数据集使用
- 3D 物体定位和检测的结果
- 定位结果,$u^{(3d)}$ is 94.74%, $v^{(3d)}$ is 97.21%, and $z^{(3d)}$ is 96.25%;之前的方法 M3D $u^{(3d)}$ is 90.59%
- 检测结果
- 相机在左下角(??为什么结果是这样的)
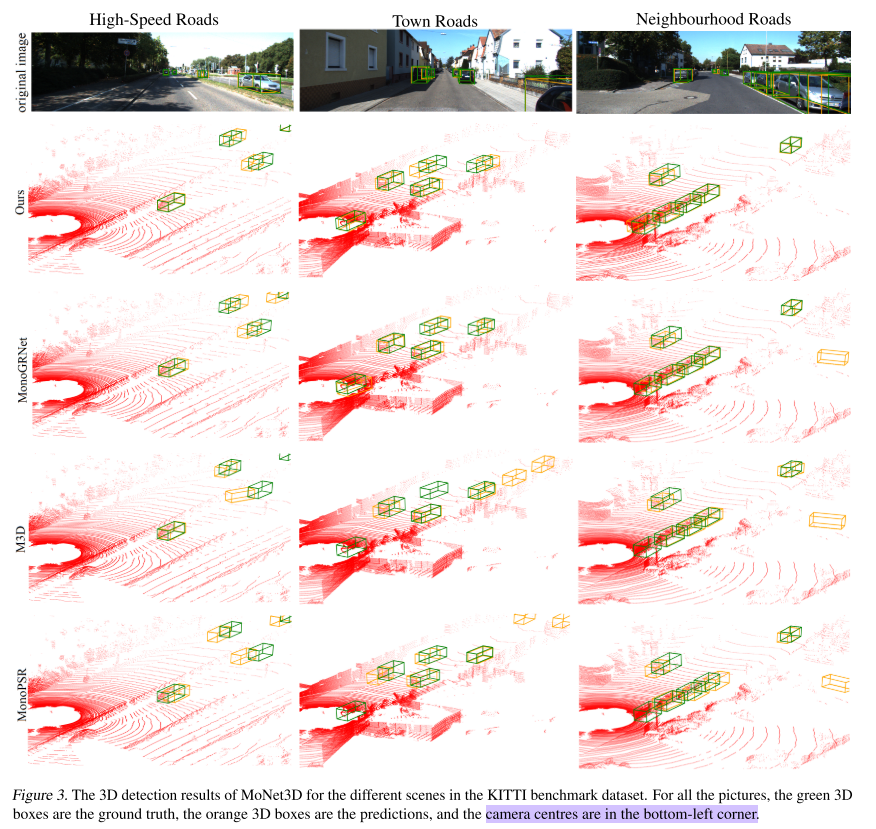
- 定位结果,$u^{(3d)}$ is 94.74%, $v^{(3d)}$ is 97.21%, and $z^{(3d)}$ is 96.25%;之前的方法 M3D $u^{(3d)}$ is 90.59%
总结和讨论
- 提出了 MoNet3D,把 local geometric relation 作为正则化项加入损失函数,提高3D定位和检测的准确率
- 较好的实时性 —— 27.85 FPS(??全文没有讲解速度快的原因,使用什么样的设备达到这样的速度)
- 当前条件,单目视觉3D仅适用于 low speed、short distance 的场景;在高速运动的场景,使用 LiDAR 才能达到可用的程度
- 考虑 2D Detection、3D Detection 相互促进