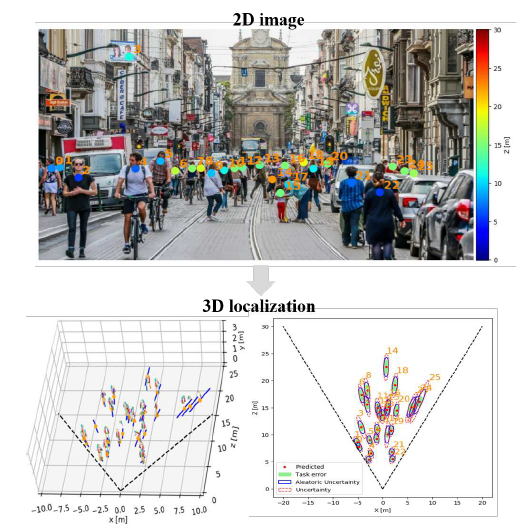
今天分享的是发表在 ICCV 2019 的一篇论文,研究的问题是:通过单目相机,给出行人在三维空间的位置,并估计这个 位置的不确定性——位置的误差 有多大。
论文标题:MonoLoco: Monocular 3D Pedestrian Localization and Uncertainty Estimation
论文作者:Lorenzo Bertoni, Sven Kreiss, Alexandre Alahi (both from EPFL VITA lab)
EPFL的全称是 Ecole Polytechnique Federale de Lausanne,又称Swiss Federal Institute of Technology,瑞士联邦理工学院,QS排名14;VITA的全称是 Vision Intelligence for Transportation,做自动驾驶、送货机器人、社交机器人等。
概览
- 本文从单目RGB图片,进行行人3D定位
- 众所周知,单目相机无法估计图像中物体深度,用它进行三维空间行人定位,任务具有歧义性
- 设计了一个基于 Laplace distribution 的损失函数,通过预测置信区间,解决歧义性
- 整个框架分为两步:
- 从RGB图片得到行人姿态——由一组人体关键点表示,使用现成的 pose detection Neural Network:Mask RCNN、PifPaf
- 把行人姿态输入另一个Neural Network,输出行人距离相机的距离 $\mu$ 和误差 $b$ $\Rightarrow$ 置信区间[$\mu - b, \mu + b$]
相关工作
- Monocular 3D Object Detection
- 有的工作研究了从单目RGB图片,检测交通车辆(把交通车辆当做刚体处理)的问题;作者认为目前还没有用单目RGB图像 + 3D定位行人的工作
- Kundegorski and Breckon [29],结合单目红外图像infrared imagery和实时摄影测量real-time photogrammetry,对行人进行定位和跟踪
- Alahi et al. 组合了单目图像和wireless signal、单目图像和visual priors进行车辆3D目标检测
- Mono3D 用深度学习方法,检测 car、pedestrian、cyclist,但是没有估计pedestrian的空间位置
- 针对车辆的检测、跟踪:从2D检测拟合3D姿态参数,典型方法Deep3DBox、MonoGRnet、Hu et al. [23]
- 综合多种信息,进行深度估计:Multi-fusion、ROI-10D
- 最近,Roddick et al. 利用积分图——integral images,把基于图像的特征映射到鸟瞰图,跳出图像域 escape image domain;和本文好像不太相关
- 拟合汽车3D模板到图像 [54, 55, 7, 30]
- Uncertainty in Computer Vision(感觉比较新颖)
- 在一些重要的应用场景下,比如自动驾驶,DNN不仅需要提供一个输出,并且还要给出不确定性估计——该输出的误差
- 传统的方法 Bayesian Neural Networks [47, 40]:通过概率分布建模模型参数的认知不确定性 epistemic uncertainty,但是通常概率分布很难解,提出另外的方法解,如 Variational Inference [20, 4, 50],Deep Ensembles [31].
- Deep Learning方法(非概率模型)——Monte Carlo dropout:Gal et al. [16, 17] 证明,在推理时候使用dropout,会产生另外的一种变分推理,网络的参数被建模成a mixture of multivariate Gaussian distributions,此时方差较小
- 计算机视觉中,MC dropout估计不确定性应用在了 depth regression tasks [25], scene segmentation [39, 25], LiDAR 3D object detection for cars [14].
- Human pose estimation
- 效果最好的方法基于CNN,分成两类:
- top-down methods:Rmpe、Mask RCNN
- bottom-up methods:PifPaf、Multiposenet、Associative embedding、Personlab
- 有的方法从2D pose预测3D joints的相对位置,比如[37, 58, 49],但是不能给出行人在真实空间的3D位置
- 效果最好的方法基于CNN,分成两类:
挑战(歧义性问题)
- 单目相机,无法获得深度信息,估计空间位置产生歧义性
- 人的高度是不同的,定位时很难处理
- 本文:
- 估计行人距相机的距离时,假设人的高度相同 $h_{mean}$,
- 估计此假设产生的误差
- 定位误差——$task$ $error$: 把定位误差看成行人距离相机 ground truth distance 的函数
- 人的高度、到相机距离,有一个三角相似性,据此能够计算 $task$ $error$:
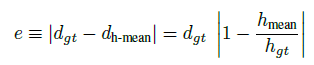
- $d_{gt}$ 人到相机的真实距离;$h_{gt}$人的真实高度
- $d_{h-mean}$ 人到相机的估算距离;$h_{mean}$人的平均高度
- 欧洲成年人,男性平均178cm,女性平均165cm,参考文献[52];但姿态检测器并不区分人的性别
- 假设人类身高服从 Gaussian distribution,作为 ground truth height distribution,因此$task$ $error$变为:
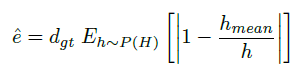
- 代表定位距离误差的下限,即 ≥ $\hat{e}$
解决方法
- 模型结构
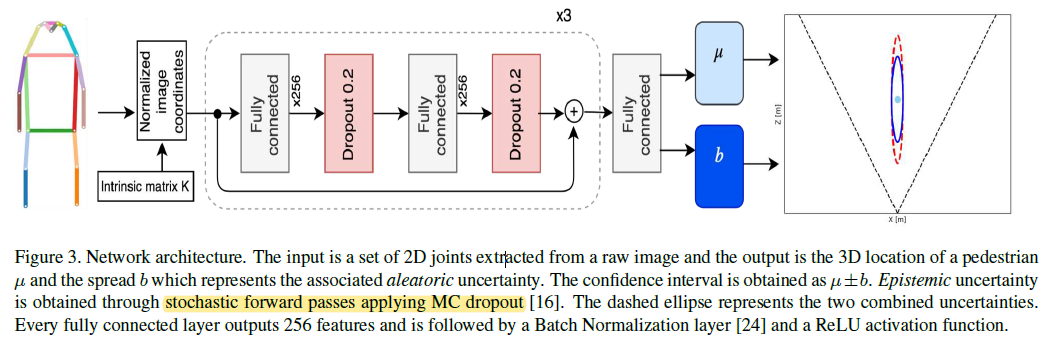
- 2D Human Poses
- 使用 off-the-shelf 方法:Mask RCNN、PifPaf
- 本文使用的数据集 KITTI、nuScene,没有在上面 finetune,因为这两个数据集上没有标注的姿态
- 输入:人体关键点,$[u_i, v_i]^T$,利用相机内参矩阵 $K$,得到归一化的图像坐标作为输入

- 归一化的目的,阻止模型对于特定相机过拟合
- 输出:人到相机的距离$d$
- \[d = \vert\vert \textbf{D} \vert\vert_2 = \sqrt{x_c^2 + y_c^2 + z_c^2}\]
- $\textbf{D}$ 是3D位置向量表示
- 行人 bounding box 的中心对应 像平面物体的中心
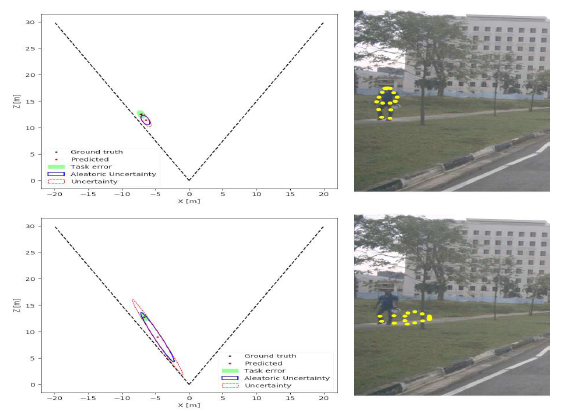
- Uncertainty
- Aleatoric Uncertainty
- 翻译成不定误差——随机误差,不能消除
- 任务本身和数据固有的属性,通过收集更多训练数据,不能使它减小
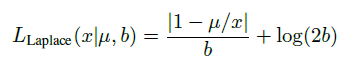
- $\mu$ 是网络预测的距离,$x$ 是真实的距离,$b$ 是网络预测的误差——预测的定位误差
- Epistemic Uncertainty
- 翻译成认知误差;我认为指常说的——系统误差,一种非随机误差,可以分析出其产生的原因并采取措施予以减少或抵偿
- 模型(这里是神经网络)参数的属性,可以通过获取更多的训练数据,使它减小

- $\theta$ 是高斯分布的均值,其方差为0
- Combined Uncertainty
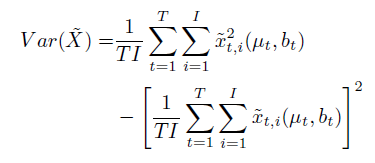
- $T$ 次 NN forward pass,计算比较费时;$I$ 是Laplace distribution采样的样本数,计算比较轻量
- Aleatoric Uncertainty
实验
- 数据集 KITTI、nuScene
- 评价指标
- Average Location Precision(ALP), defined by Xiang et al. [54] for the car category
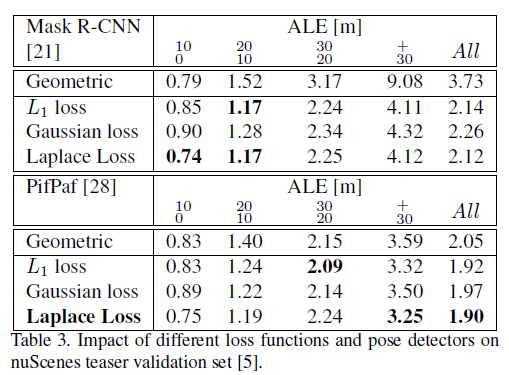
- Average Location Error(ALE)
- 对比的方法
- Geometrical Approach,假设人的高度相同,利用姿态检测器计算关键点在图像的像素,同时分析了训练集中关键点的真实距离;利用针孔相机模型,计算距离
- Mono3D,3D检测 car、pedestrian、cyclist
- MonoDepth,预测图像像素的深度值
- 3DOP,双目相机,3D检测 car、pedestrian、cyclist

- 其他对比
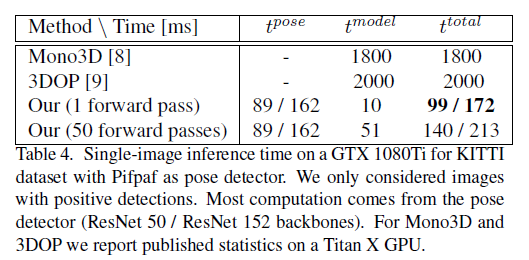
- 运行时间
- 消融实验
- 离群值敏感性
- 运行时间