今天要分享的是谷歌发表在 CVPR 2020 上的一篇论文,研究的问题是目标检测,在保证准确率的情况下提高模型效率,这里的效率指模型大小和训练/推理时间,都是越小越好;论文的实验效果很惊艳。
论文标题: EfficientDet: Scalable and Efficient Object Detection
论文作者: Mingxing Tan, Ruoming Pang, Quoc V. Le (both from Google Brain)
论文贡献
- 保证准确率的情况下,大幅提高检测效率
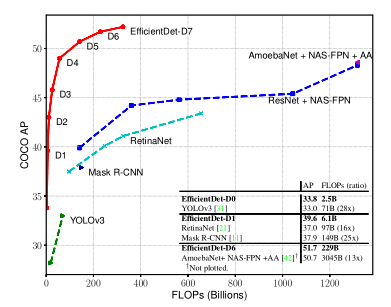
- 提出一个检测器系列 EfficientDet D0-D7,适配不同资源场景
- 提出BiFPN,提升特征融合效果(可能是为了凑工作量)
测试原因
- 论文中的效果太惊艳了,加之谷歌背书,可信度比较高
- 创新性比较大,提出了一个检测器系列 EfficientDet D0-D7,其中最次的D0和 YOLOv3效果持平
- 应用在实际中效果到底如何
开发环境准备
- Ubuntu 16.04
- miniconda创建虚拟环境,python 3.7、TensorFlow 1.15
- 在自己笔记本电脑上进行的测试,没有GPU也能跑起来,这是这个项目好的地方之一
使用的模型
测试用例
- Youku 的一个视频,关于候鸟迁徙的,时长50多秒
- 一个工厂外部的监控视频,监控来回的行人和车辆,视频画面动的是人,在一条丁字路来回走动;没有公开的链接
测试结果
- 对于第一个测试用例
- 用EfficientDet-D0就达到了比较好的效果,视频中的飞鸟应检尽检,也得益于飞鸟很大,背景是天空,没有复杂的场景和物体
- 因为这个视频不是下载下来的,而是我用录屏软件生成,所以开始和结尾会有录屏软件和其他杂乱的东西,对于这部分产生了误检,把录屏软件当成了“book”、“cell-phone”
- 对于第二个测试用例
- EfficientDet D0 和 D2 都测试了,当人离镜头远的时候 D0 和 D2 都跟丢了;调整镜头焦距离人近的时候,同时能跟踪到;说明对于小物体的检测做的不好,因为训练数据 Imagenet、COCO 没有针对小物体,网络结构也没有针对小物体设计
- D2的检测效果好于D0,体现在D2比D0更早追踪到人,也就是说离镜头远的时候,D2检测到人的时候,D0还未能做到
- D2的推理速度慢于D0,D2用时近一小时,D0十多分钟;CPU确实慢
- EfficientDet 这种检测器本质上是一副图片,没有考虑图片间的时序关系,虽然能实现物体跟踪的效果,但是和物体跟踪范式还有所区别